Introduction
The development of autonomous mining machines and autonomous haulage systems (AHS) for mining has attracted the attention of many machine manufacturers in recent years (1, 2). These systems automate material handling in truck-and-shovel mining operations and, according to manufacturers, have led to improvements in productivity and safety in numerous mining operations (3). Typically, the development interest in these cases focuses on autonomous material transport. The ARTUS research project (autonomous robust transport system for hybrid environmentally friendly raw material extraction based on articulated special purpose vehicles) also aimed to develop systems for the holistic implementation of a complete loading-unloading cycle by an autonomous special purpose vehicle fleet. In this context, a fleet consisting of several articulated dump trucks and a loading vehicle was converted for autonomous operation. A broad consortium of academic and private-sector partners was involved in realising the research goals of the ARTUS project:
- Conversion of articulated dump trucks for autonomous operation (Fritz Rensmann GmbH);
- sensor equipment and automation of articulated dump trucks (mascor-Institute, FH Aachen und xtonomy GmbH);
- localisation and trajectory control of articulated dump trucks (Institute for Control Engineering, RWTH Aachen);
- fleet planning (mascor-Institute, FH Aachen);
- automation of the loading vehicle (nerospec SK GmbH); and
- M2M communication of process participants (Institute for Advanced Mining Technologies, RWTH Aachen).
This article presents project works and research results of the Institute for Advanced Mining Technologies (AMT) of RWTH Aachen University (RWTH), Aachen/Germany, in the field of machine-to-machine (M2M) communication of mobile mining machines within the ARTUS project. The background and problems of M2M communication in mining as well as the solution approach of currently available systems are presented. Subsequently, the developed solution approach using an M2X gateway is explained. Finally, the technical implementation and evaluation are discussed.
Interaction and communication
The loading and transport cycle is responsible for the efficient transport of large quantities of material from the mining site and is therefore a central part of the mining process. In discontinuous mining, the loading and transport cycle refers to the intake of material by loaders, the loading of the material onto transport vehicles, and the transport to a dump site. Because of its integral role, the efficiency of this cycle is critical to the overall success of a mining operation. This cooperative process with physical interaction of heavy machinery also requires a high degree of coordination between the process participants to ensure not only efficiency but also the smooth and safe execution of the process. Beyond the technically demanding realisation of individual autonomous mining machines, another central aspect of autonomous fleets is thus the interaction of several process participants. One challenge is the development of a communication infrastructure for mining environments and ensuring the required M2M communication.
Autonomous Haulage Systems on the market solve this problem by means of comprehensive network coverage and permanent connection of all participants to a centralized network (4). Such conventional networks using a star topology are always dependent on an intact connection to a central node (access point), which is responsible for routing the data packets to the respective addressed network nodes, in order to maintain communication capability. These networks thus have a single point of failure. Figure 1 illustrates the structure of a centralised network.
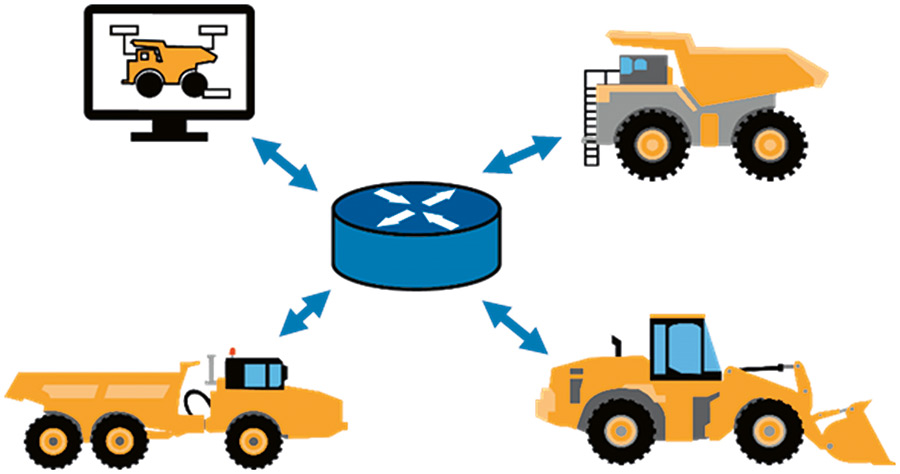
Fig. 1. A centralised network in a star topology making use of a constant connection to the router. // Bild 1. Zentralisiertes Netzwerk in Sterntopologie mit ständiger Verbindung zum Router. Source/Quelle: AMT
Here, an interruption of the connection to the router not only means a loss of monitoring capabilities in a fleet management system (FMS) but also a loss of communication links with other process participants in the immediate vicinity.
Notably, following the ore deposits, surface and underground mines are expansive and variable environments. Thus, due to the progression of the extraction site, a constant expansion of the network and regular upgrading of infrastructure is required. In mine sites, device and maintenance of a centralised, wide-area network infrastructure represent significant cost and labor, which is a reason why the problem of connectivity in mining is often a barrier to innovation. (5)
Decentralised communication via M2X gateway
In order to meet these increased requirements, an ad-hoc communication system for special mining vehicles was developed in the ARTUS project to enable decentralised communication between the participants in the mining process. The development, evaluation and integration of the communication hardware and software into a M2X gateway was conducted by the AMT in the ARTUS project.
To meet the requirements resulting from the mining process, two communication technologies are synergistically combined in the M2X gateway. In this way, both direct communications between machines in spatial proximity are ensured and robust, basic monitoring of the machines by an FMS is enabled.
Decentralised M2M communication is based on a mesh communication network that enables direct communication. In such a mobile ad-hoc network for vehicles (VANET), each vehicle acts as its own network node that can communicate with neighbouring nodes in a direct way, as well as adaptively connect remote systems through multi-hopping. In contrast to a star topology of a network, the VANET is not spanned by stationary access points, but by the M2X gateway of the vehicles themselves. In this way, process participants can communicating with each other in spatial proximity without having to rely on the connection to external network infrastructure. Furthermore, the mesh network can be flexibly expanded by strategically placing additional M2X gateways as network nodes.
As a physical network layer, the M2X gateway uses the IEEE802.11n standard, also known as Wi-Fi 4, to achieve the highest possible radio range with high data throughput. All Wi-Fi stations of the M2X network are used in IBSS mode (Independent Basic Service Set) so that they can communicate directly with each other. An operating system kernel-based mesh network driver implements a mesh routing protocol that enables multi-hopping across multiple Wi-Fi stations. The mesh routing protocol works on the data link layer, which enables agnostic application of various network protocols of the higher layers.
For monitoring the mining vehicles in remote areas, the long-range communication technology LoRa is used as a second radio standard. LoRa technology is a radio technology (868 MHz) that is characterised by a particularly high radio range compared to other radio technologies such as Wi-Fi or Bluetooth. Since these properties are achieved at the expense of the achievable data rate, the LoRa standard is particularly popular in the application area of remote sensor systems and Internet of Things (IoT) systems, where small amounts of sensor data must be sent in longer cycles. Table 1 schematically compares the LoRa and Wi-Fi radio technologies.
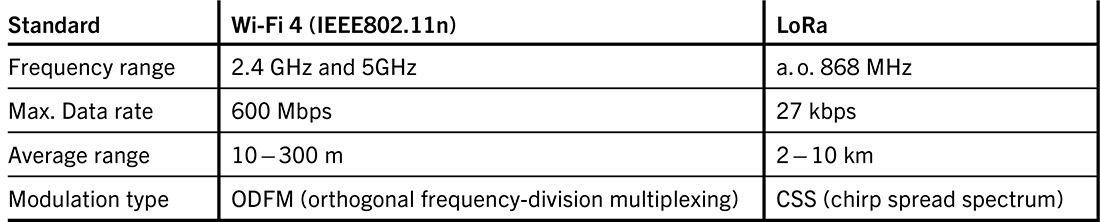
Table 1. Comparison of relevant performance metrics of Wi-Fi 4 and LoRa (6). // Tabelle 1. Vergleich relevanter Leistungsmetriken Wi-Fi 4 und LoRa (6).
The Wi-Fi mesh based VANET cannot guarantee a continuous network connection from machine to FMS, which is why these properties of LoRa technology are used in the ARTUS project to transmit smaller status updates of the machine cyclically to the FMS. In this way, robust, basic monitoring of the machine fleet can be realised with significantly reduced infrastructural effort. Figure 2 stylistically highlights the synergetic use of both radio technologies in the ARTUS project.
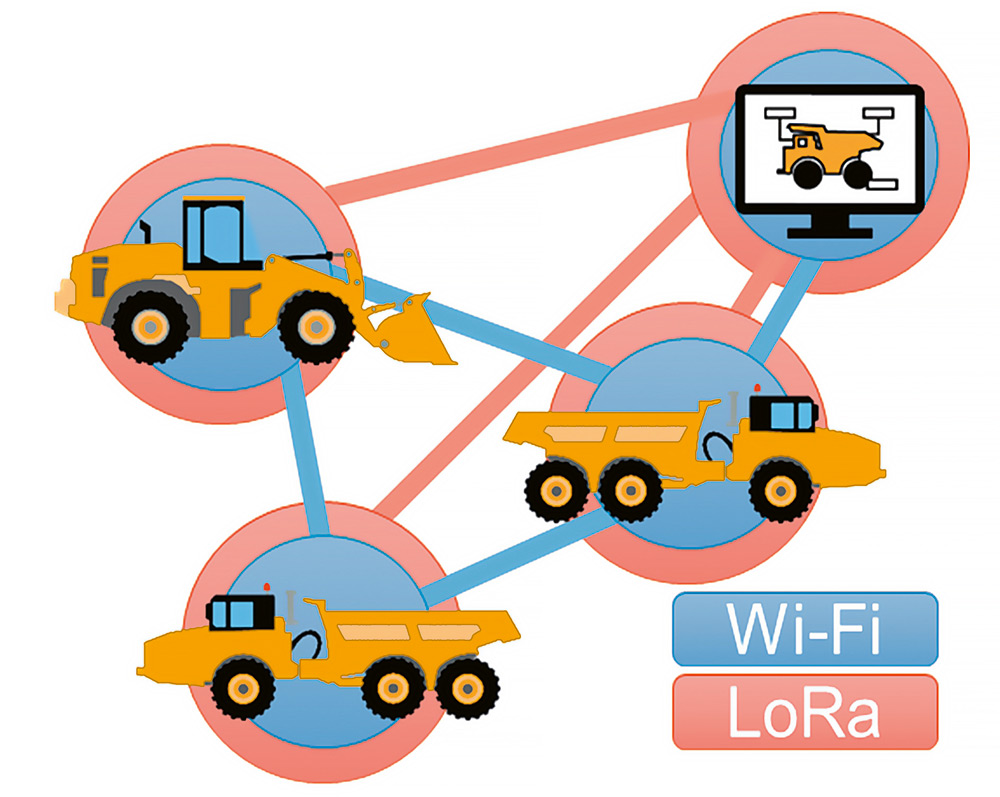
Fig. 2. Synergetic application of LoRa and Wi-Fi in the ARTUS project. // Bild 2. Synergetische Anwendung von LoRa und Wi-Fi im ARTUS-Projekt. Source/Quelle: AMT
In addition to the physical provision of a communication path, specifying the type and content of the required communication is another challenge. Initial standardisation efforts in this area aim to facilitate the expansion of the vehicle fleet and integration of new vehicles by defining a manufacturer-independent and standardised communication interface. (7) Sitting on the mesh communication network layer, OPC UA (Open Platform Communication Unified Architecture) was implemented as a manufacturer-interoperable and standardised protocol interface from ISO layer 5 onwards and was integrated into the M2X gateway. Thus, relevant vehicle data are made available semantically structured via an OPC UA server. This enables, e. g., the implementation of the OPC UA Companion Mining, which specifies the relevant information for handling the loading and unloading process in mining, among other things.
Technical implementation and evaluation
The physical integration of the developed system takes the form of additional hardware in dustproof and waterproof housings, which are subsequently integrated on the machines and connected to the machine’s internal network via wired Ethernet LAN. Power is supplied via a vehicle-typical 24 VDC voltage circuit.

Fig. 3. M2X gateway in battery mode. // Bild 3. M2X-Gateway im Akkubetrieb. Photo/Foto: AMT
Besides the supply via vehicle voltage, further gateways for battery operation were designed to enable flexible expansion of the mesh network by additional placement of nodes. Figure 3 shows the M2X gateway developed by AMT, figure 4 the converted dump truck with integrated M2X gateway.

Fig. 4. Articulated dump truck with integrated M2X gateway. // Bild 4. Knickgelenkter Muldenkipper mit integriertem M2X-Gateway. Photo/Foto: AMT
In test measurements, the developed VANET met the requirements for transmitting standardised text-based messages. The re-routing of the network path over one or more hops was seamless and without noticeable delay. Network coverage was evaluated using a custom mapping tool (heat map) that displays selected network metrics in spatial relation for the user to read. Figure 5 shows a section of this heat map over the test environment of the mining area.
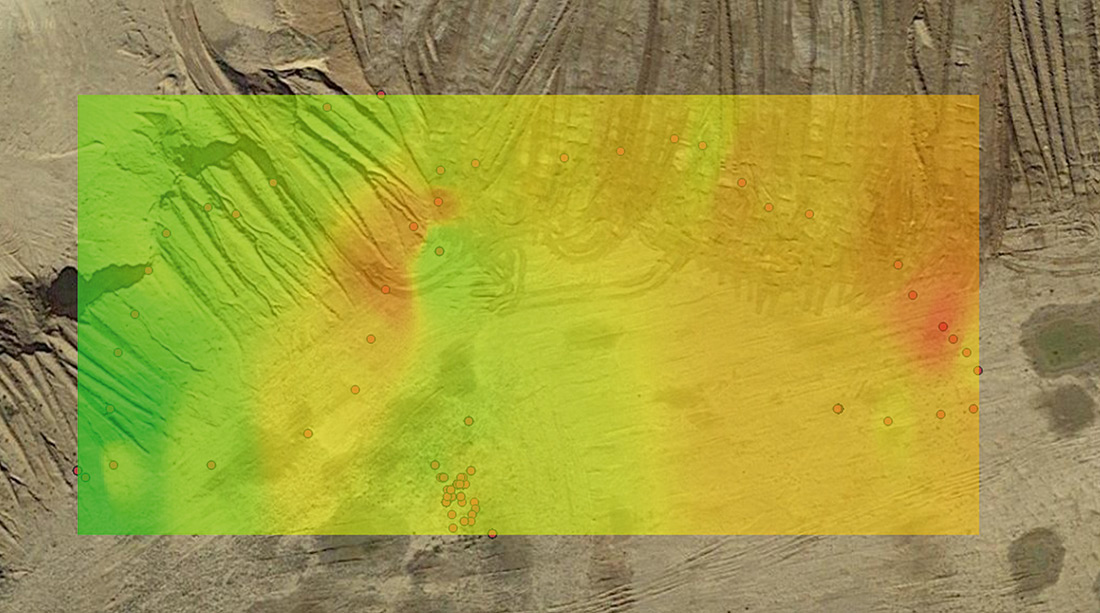
Fig. 5. Heat map for the open-pit test environment. Green symbolises higher and red lower signal strength of a mobile node to the respective next network node. // Bild 5. Heatmap über der tagebaulichen Testumgebung. Grün symbolisiert höhere und rot eine geringere Signalstärke eines mobilen Knotens zum jeweils nächsten Netzwerkknoten. Source/Quelle: AMT
The trajectory of the mobile node can be seen based on the measurement points (red). The signal strength of a mobile network node is shown in colour, with green symbolising a higher and red a lower signal strength to the next best node in the environment. The LoRa network for data transmission of sporadic status messages has fully met the requirements and it was possible to transmit data over the entire test site of an open pit mine using a single transceiver pair.
Summary
The goal of the ARTUS project was to implement an autonomous vehicle fleet for a truck-and-shovel mining operation. An integral part of this is the interaction of the process participants and therefore the M2M communication of mobile mining vehicles. The AMT has developed the M2X gateway as a prototype that enables decentralised communication between the process participants via a VANET. The radio technologies LoRa and Wi-Fi are implemented here to synergistically use the strengths of both technologies in the application case. While direct M2M communication takes place via the Wi-Fi VANET, which has a higher throughput, LoRa communication is used for sporadic status communication of the machine to the FMS. To standardise M2M communication at the higher network layers, an OPC UA interface was implemented to make relevant and defined information accessible to the machine. Certain aspects of the M2X gateway, as developed in ARTUS, will be taken up at the AMT in the course of further projects. Within the NexGen-SIMS project, the use of LoRa technology for underground environments is being evaluated. In the ELMAR project, AI-supported algorithms for protocol negotiation of the application layer are being implemented and tested.
Funding
The project is funded by the funding programme “IKT 2020 – Research and Innovations” of the Federal Ministry of Education and Research under project funding number 033R126DN.

References / Quellenverzeichnis
References / Quellenverzeichnis
(1) Hitachi Ltd. (2022): hitachicm.com, 29.11.2022. Online available: www.hitachicm.com/global/en/solutions/solution-linkage/ahs/
(2) Komatsu Ltd. (2022): komatsu.com, 29.11.2022. Online available: www.komatsu.com/en/site-optimization/smart-mining/loading-and-haulage/autonomous-haulage-system/
(3) Caterpillar Inc. (2022): mining.com, 16.3.2022. Online available: www.mining.com/web/caterpillar-autonomously-hauls-more-than-1-billion-tonnes-of-material-with-cat-command-for-hauling-in-less-than-a-year/
(4) Gaber, T.; El Jazouli, Y.; Eldesouky, E.; Ali, A. (2021): Autonomous Haulage Systems in the Mining Industry: Cybersecurity, Communication and Safety Issues and Challenges. Electronics, 2021.
(5) Clausen, E.; Lehnen, F.; Sörensen, A.; Uth, F.; Mitra, R.; Schwarze, B. (2020): Assessment of the Effects of Global Digitalization Trends on Sustainability in Mining Part II. Bundesanstalt für Geowissenschaften und Rohstoffe, Hannover, 2020.
(6) Adelantado, F.; Vilajosana, X.; Tuset-Peiro, P.; Martinez, B.; Melia-Segui, J.; Watteyne, T. (2017): Understanding the Limits of LoRaWAN. In: IEEE Communications Magazine, September 2017, pp. 34-40.
(7) OPC Foundation (2022): OPC UA for Mining – OPC UA Companion Specification. 1.10.2022.