1 Introduction
The exploration of outer space has always fascinated mankind. In this context, building colonies on moon or Mars has gained interest in the last years. In order to enable a long-term presence of humankind on other celestial bodies, the use of locally available raw materials, the so-called In Situ Resource Utilization (ISRU), is essential to reduce the need for raw materials that would otherwise have to be transported from Earth. The first objective will be to preserve life-supporting processes. (1)
Therefore, the ice that exists at the poles of the moon, e. g., is of interest. This could not only be used as water, but also be separated into oxygen and hydrogen, which could serve as fuel for rockets. (1, 2)
Besides the ice at the poles of the moon, the lunar regolith is of interest for any ISRU activity. The regolith is a fine dust-like raw material that covers the entire lunar surface. In the lunar highlands the depth of this layer is around 10 to 15 m, in the mare areas it is 4 to 5 m. The regolith is formed by meteorite impacts that destroy the lunar surface. At the same time, subsequent impacts cause the regolith to mix, so that it is heterogeneous in its composition. (3)
In its original form, the regolith could be used as a building material or for radiation protection. Furthermore, the extraction of metals and oxygen, which exist in bonded form in the regolith, is part of ongoing research.
For being able to utilize the regolith, as in terrestrial processes, the excavation of the raw material follows the previous exploration. In the following, the challenges of resource excavation on the moon will be explained. Based on this, different concepts for the ISRU will be presented to meet these challenges.
2 Raw material excavation on the moon
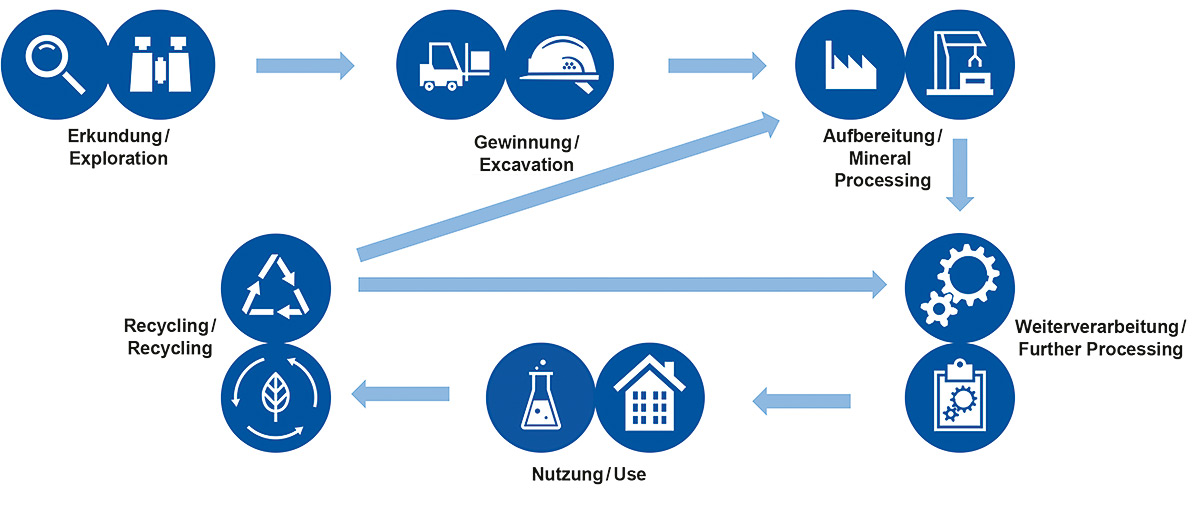
Fig. 1. Idealized sketch of an ISRU process chain. // Bild 1. Idealisierte Darstellung einer ISRU-Prozesskette. Source/Quelle: AMT
Figure 1 schematically shows an ISRU process chain. First exploration takes place. Then mineral processing follows the excavation of the regolith. Finally, further processing, like metallurgical processes, might follow before the utilization of the material. For a responsible use of the resources available on the lunar surface, recycling is also intended to be part of the process chain for ISRU.
The raw material excavation, as well as other ISRU processes, is however challenged on the one hand by the characteristics of the regolith. The regolith is not only fine and dusty, but also electrostatically charged and has adhesive properties which poses challenges, e. g., when using cameras. (3, 4)
On the other hand, challenges arise from the lunar environment. In terrestrial mining, large and heavy machines are typically used to apply the digging forces required to mine the raw materials. On the moon, due to the reduced gravitational acceleration of 1.62 m/s-2 , compared to 9.81 m/s-2 on Earth, applying the digging forces would get even more difficult. In addition, the lunar atmosphere is so thin that it is often described as a vacuum and temperatures are characterized by extremes of - 153 °C during the night and up to 107 °C during the lunar day. Another challenge is the radiation, which not only poses a danger to humans but can also cause damage to electronic equipment. Furthermore, the day and night cycles of 29.5 Earth days must be taken into account, especially in terms of energy supply. (3, 5, 6)
To sum it up, the lunar environment is extremely challenging. Therefore, all processes must work autonomous or at least tele remote. If necessary, personnel could monitor the processes from a control room integrated into a lunar habitat.
In addition to this, the distance between Earth and the moon is quite large and payloads of rockets are limited. Therefore, it would not be possible to transport terrestrial mining machines to the lunar surface. Moreover, it would not be reasonable to use large and heavy terrestrial mining machines, since it is likely that initially only small amounts of regolith will be excavated. Instead, machines for lunar mining should be small and lightweight.
2.1 Existing approaches for regolith mining
Existing concepts for mining regolith on the moon have focused on how to excavate the raw material under the lower gravity and how to reduce the digging forces that have to be applied during the process. Many of these concepts are inspired by terrestrial mining machines. An overview of these developments can be found, e. g., in Mueller und van Susante (7) or Just et al. (8).
The NASA. e. g., has been developing and optimising the RASSOR, the Regolith Advanced Surface Systems Operations Robot. The RASSOR has two counter-rotating drums equipped with small blades in order to neutralize the digging forces. After initial testing, the RASSOR was further developed to have a lower mass and higher capacity. While the first version has been equipped with a chain drive, this was replaced by wheels as they would be less vulnerable. Currently, evolution from Technology Readiness Level (TRL) 4 to 5 is happening. As soon as TRL 6 is achieved, the RASSOR is expected to be a suitable candidate for missions on other celestial bodies. (7, 9) However, the RASSOR is equipped with many moving parts. Due to the challenging conditions, such as the abrasive characteristics of the regolith, this may be a disadvantage from a maintenance point of view.
In addition to the approaches inspired by terrestrial mining machines, there are other alternative concepts, such as the pneumatic regolith excavation, which can be compared to the principle of a vacuum cleaner (10) or percussive excavation. This concept involves a shovel equipped with a percussive function in order to reduce the digging forces. (11)
Furthermore, NASA regularly organizes challenges and competitions for extraterrestrial mining, in which mainly student teams can develop and test new excavation concepts (8). In 2020 a team of students from RWTH Aachen University (RWTH), Aachen/Germany, that was supported by the Institute for Advanced Mining Technologies (AMT), participated in a challenge to optimize the RASSOR.
So far, all the approaches for extraterrestrial mining have only been tested on Earth. Consequently, no optimal method for regolith extraction has been identified to date. This is, among other things, due to the fact that the environmental conditions on the lunar surface cannot be replicated 1 to 1 on Earth. Consequently, further investigations are required in the future.
2.2 Selective regolith mining
It becomes clear that innovative methods are required for mining raw materials on other celestial bodies, such as the moon, e. g., to meet the challenges posed by the reduced gravity. Due to the harsh environment, it would be favorable to have machines without many moving parts. In addition, such machinery must be robust and operate tele remotely or even autonomously due to the environmental conditions. Moreover, to reduce transportation costs of the machinery or components, mining machines need to be small in size and operate efficiently.
These requirements can be partially compared with the requirements for terrestrial mining, where an increasing demand for raw materials, with simultaneously decreasing concentrations of valuables and more complex deposits, make the excavation of raw materials increasingly challenging. This is also accompanied by a growing awareness for safety and a responsible treatment of our planet. One approach to meet these challenges is the increasing automation of mining machinery and processes and the development of innovative methods for raw material excavation. From this, it becomes clear that the concepts, to meet the challenges in raw material excavation on Earth and on other celestial bodies, such as the moon, can be similar in some aspects. Therefore, developments in the area of space mining can be based on existing experience in the area of terrestrial mining. At the same time, future developments in the area of space mining can help to develop novel solutions for future challenges in the area of terrestrial mining. (12)
One possible approach to meet the demand for an efficient mining process is selective mining. In terms of the excavation of regolith this means, that only the regolith, that already has a slightly higher concentration of the valuable mineral is excavated.
In order to implement this concept, the requirements of the subsequent processes need to be known. A certain mineral composition or defined particle size, e. g., may be required or at least helpful to make the subsequent processes more efficient. In addition to this, it is necessary to know which quantities of the material must be provided at a defined place and time. Furthermore, the local environmental conditions must also be identified. This includes information on where to find the valuable resources and in which concentrations.
Therefore, the concept of selective raw material excavation differs from previous developments in the field of space mining, as no longer only the mining process itself is considered, but also the processes linked to it. In order to get this information, suitable sensor technologies for regolith characterization immediately before, during or after the excavation process should be integrated into the process.
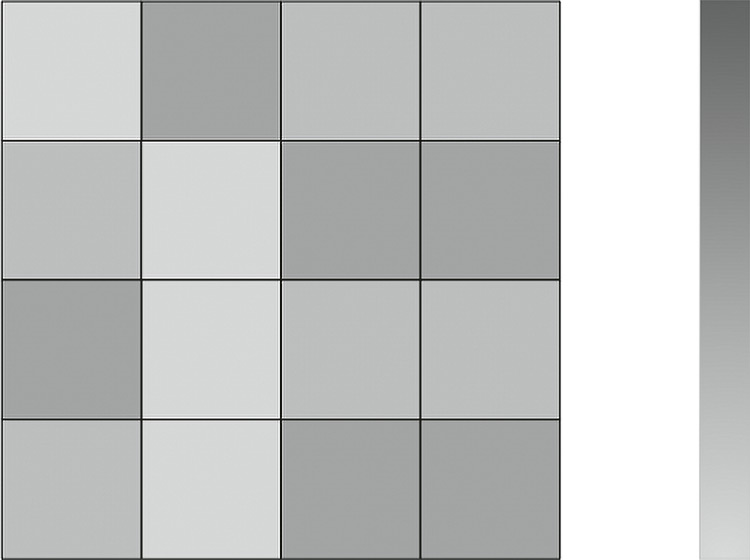
Fig. 2. Schematic depiction of a regolith mine site (12). // Bild 2. Schematische Darstellung einer Regolith-Lagerstätte (12).
The concept of selective regolith excavation will be explained in detail based on figure 2. This schematically shows a mine site as a block diagram. This is divided into smaller areas for excavation. For each field, a material characterization could be carried out using suitable sensor technologies. In the figure, different shades of grey represent different concentrations of the valuable mineral. The idea of selective regolith mining is now to mine the regolith in those areas, where the concentration of the valuable mineral is already slightly increased. Furthermore, mining conditions need to be considered. This means that regolith mining may also needs to take place in areas where the concentration of the valuable resource is not increased in order to expose areas with an increased concentration of the valuable resource. Even though absolute dimensions need to be defined for a specific use case, it becomes clear that the excavated masses and therefore the machine dimensions could be reduced with selective regolith mining.
Even if it is not possible to characterize and excavate single particles and therefore provide the perfect input material for subsequent processes, already slightly higher concentrations of the valuable resource will help to optimize those processes.
3 Concepts for ISRU
Consequently, a holistic approach is of great importance for all activities in the field of ISRU. Only when experts from different fields, both terrestrial and space, collaborate the challenges of ISRU can be addressed in the best possible way.
3.1 The Moon Factory concept
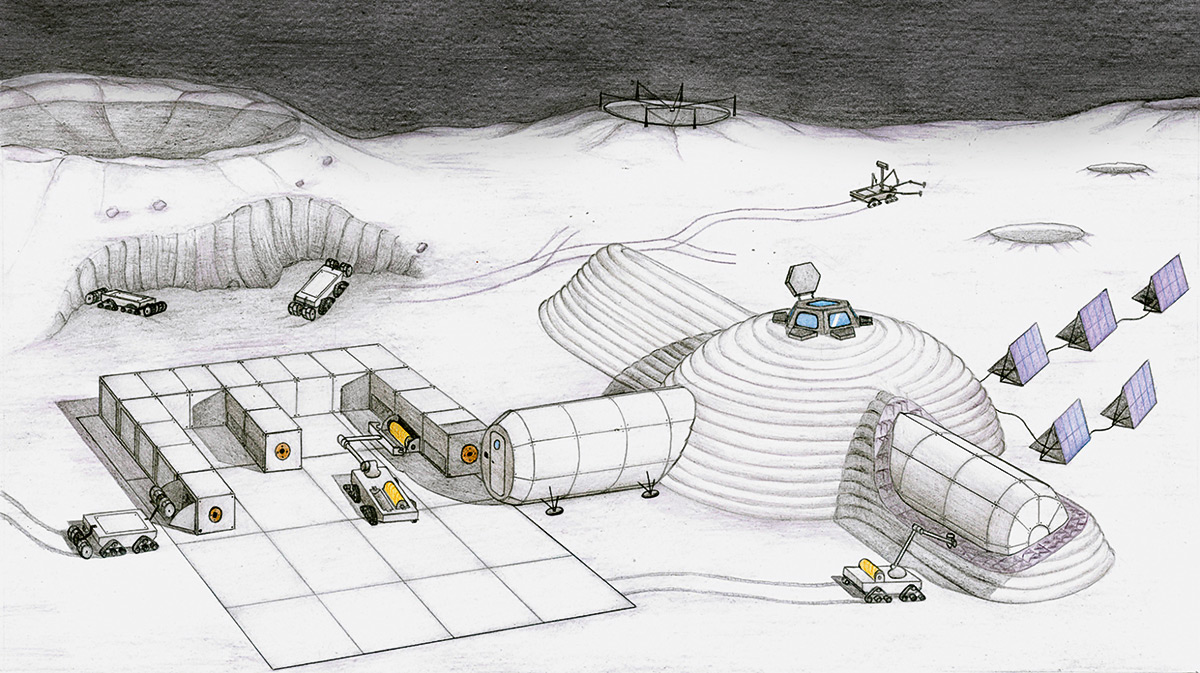
Fig. 3. Illustration of the Moon Factory concept. // Bild 3. Künstlerische Darstellung des Moon Factory Concepts. Source/Quelle: AMT
After the exploration, the regolith is excavated. Subsequent mineral processing is followed by further processing steps, such as the extraction of oxygen and metals or, as shown in figure 3, the production of fibers. These fibers could be used for the construction of a lunar colony. The long-term objective of the Moon Factory is to create a factory on the moon that will help to build a lunar habitat, using the raw materials available on site as completely and efficiently as possible. In future, based on the concept, initial investigations should be conducted with emphasis the connection between the individual sub-processes.
3.2 From lunar regolith to oxygen and structural materials – an integrated conceptual approach
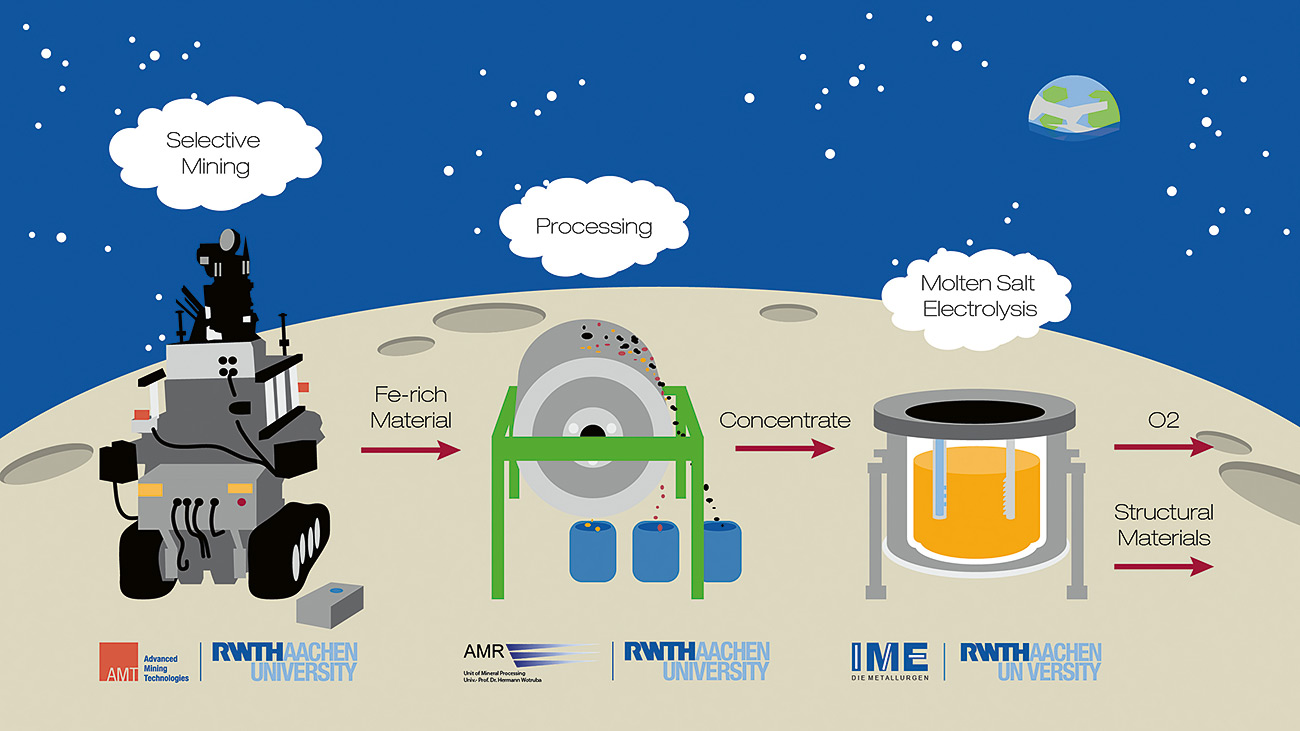
Fig. 4. Integrated approach for the production of oxygen and metals using lunar regolith. // Bild 4. Integrierter Ansatz zur Gewinnung von Sauerstoff und Metallen aus lunarem Regolith. Source/Quelle: RWTH
The idea of selective mining is also incorporated in a concept for the extraction of oxygen and structural materials from lunar regolith, which is shown in figure 4. The concept takes into account the excavation of raw materials as well as the mineral and metallurgical processing and has been developed by the AMT, the Unit for Mineral Processing (AMR) and the IME Metallurgical Process Engineering and Metal Recycling at RWTH. By the selective excavation of the regolith, an input material already enriched with ilmenite is provided for mineral processing. The latter will then produce an ilmenite concentrate which is the input for metallurgical processing. Finally, oxygen and high-quality metals are produced using the MOSARI technique. The concept is characterized by the reduction of residual streams by an efficient and as fully as possible utilization of the regolith. (12)
3.3 New ideas for regolith mining – the SILER
The safe and efficient supply of raw materials through the automation and digitalization of mining machinery and processes plays an important role not only in research and transfer, but also in teaching at the AMT. The aim is to train young engineers and equip them with the necessary skills they need for working in and creating the mining industry of the future. These young engineers are in the focus of the AMT’s teaching. The aim is to provide them a structured framework that will enable them to gain the best possible qualifications and thus be qualified for their future tasks. By offering and supervising student challenges, students are given the opportunity to independently solve challenges in a team while still studying and thus actively contribute to forming the mining industry of the future. Within a structured framework, students work in teams to apply and develop the skills they have acquired during their studies to real issues, including those in the ISRU field.
As part of the master’s course “MTPlan”, a device for mining regolith was designed in the winter semester 2020/2021. The Scraper Inspired Lunar Excavation Rover (SILER), which is shown in figure 5, is based on a simple, modular and robust design. It is further characterized by few moving parts. The developed concept was presented at the Space Resources Week 2021 poster exhibition in Luxembourg. (13)
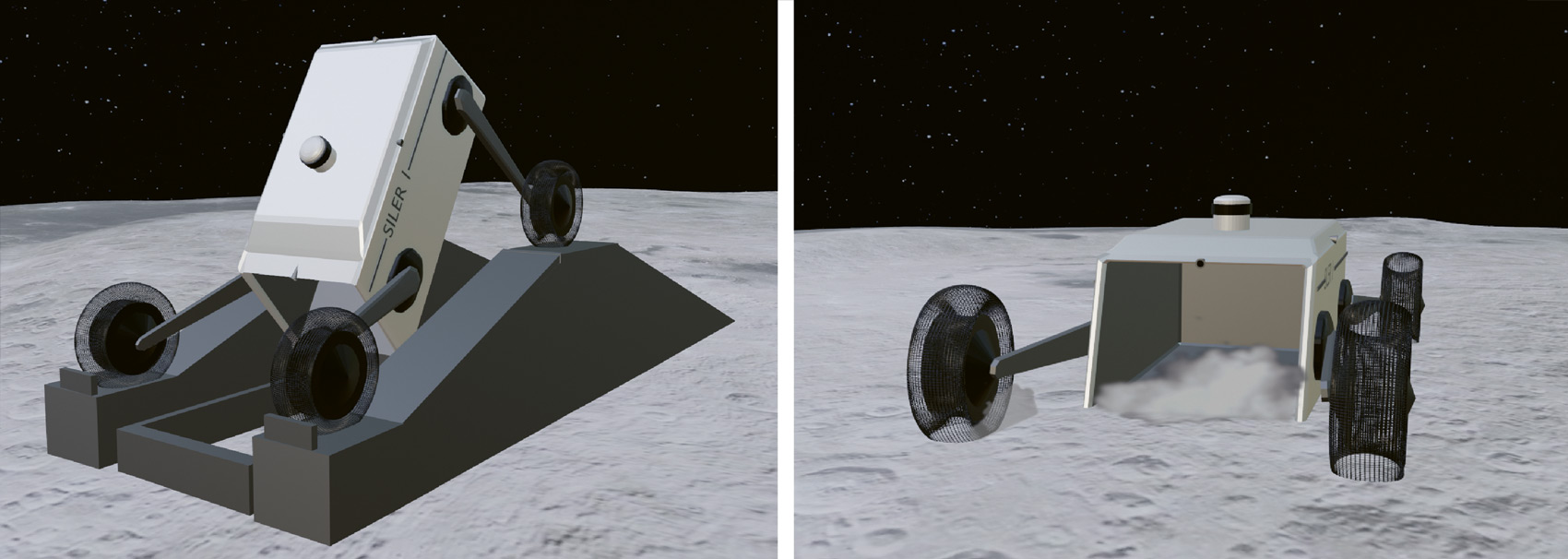
Fig. 5. // Bild 5. Sraper Inspired Lunar Excavation Rover. Source/Quelle: RWTH
3.4 New approaches for transporting lunar regolith – the regONE system
In 2022, the Moon Aixperts, an interdisciplinary team of RWTH students supported by the AMT and others, participated in the Over the Dusty Moon Challenge of the Colorado School of Mines (CSM). The task was to develop a concept for the transport of lunar regolith. As part of the final, the Moon Aixperts presented the prototype of their regONE system, shown in figure 6, in June 2022 and received the award for the most innovative system. The regONE system is a modular system for transporting large volume flows. It comprises a component for the horizontal transport and one for the vertical transport.

Fig. 6. The Moon Aixperts’ regOne system. // Bild 6. Das regONE-System der Moon Aixperts. Source/Quelle: RWTH
4 Summary and Outlook
In order to enable a long-term presence of humans on other celestial bodies, such as the Moon, the utilization of extraterrestrial raw materials is of great importance. Among others, research focuses on the lunar regolith, a dust-like raw material that covers the entire lunar surface.
The first step in making raw materials usable, as on Earth, is to mine them. On the moon, however, mining raw materials is complicated by an extreme challenging environment and the properties of the regolith. To meet the challenges, new innovative ideas for raw material excavation are needed. On possible solution is the concept of selective mining in order to provide the required amount of the highest quality raw material possible at the right time and place for the subsequent processes.
It becomes clear that a holistic approach as well as cooperation in interdisciplinary teams are inevitable in all activities in the field of ISRU. Examples that include various activities along the process chain for ISRU and are based on collaborative efforts in interdisciplinary teams are the Moon Factory Concept and a concept for the extraction of oxygen and metals, were and are further developed at RWTH.
In addition, student activities such as the development of the SILER or the regONE system also show approaches to address various challenges in the field of ISRU.
References / Quellenverzeichnis
References / Quellenverzeichnis
(1) Sanders, G. B. (2015): Space Resource Utilization: Technologies and Potential Synergism with Terrestrial Mining. NASA Johnson Space Center. Canada. Online verfügbar unter https://ntrs.nasa.gov/citations/20150003499
(2) Sanders, G. B.; Larson, W. E. (2013): Progress Made in Lunar In-Situ Resource Utilization under NASA’s Exploration Technology and Development Program. In: Journal of Aerospace Engineering 26 (1). DOI: 10.1061/(ASCE)AS.1943-5525.0000208.
(3) Heiken, G. H.; Vaniman, D. T.; French, B. M. (1991): Lunar sourcebook: a user’s guide to the Moon.
(4) Stubbs, T.; Vondrak. R.; Farrell, W. (2007): Impact of dust on lunar exploration. In: Dust in Planetary Systems 643, pp 239 – 243.
(5) Benaroya, H. (2017): Lunar habitats: A brief overview of issues and concepts. In: REACH 7-8, pp 14–33. DOI: 10.1016/j.reach.2018.08.002.
(6) Gläser, P.; Oberst, J.; Neumann, G. A.; Mazarico, E.; Speyerer, E. J.; Robinson, M. S. (2018): Illumination conditions at the lunar poles: Implications for future exploration. In: Planetary and Space Science 162, pp 170 – 178. DOI: 10.1016/j.pss.2017.07.006.
(7) Mueller, R. P.; van Susante, P. J. (2012): A Review of Extra-Terrestrial Mining Robot Concepts. In: K. Zacny, R. B. Malla und W. K. Binienda (Hg.): Earth and Space 2012. Engineering, science, construction, and operations in challenging environments. Proceedings of the 13th ASCE Aerospace Division International Conference on Engineering, Science, Construction, and Operations in Challenging Environments and the 5th NASA/ASCE Workshop on Granular Materials in Space Exploration. April 15 – 18, 2012, Pasadena, California, United States. Reston, VA: American Society of Civil Engineers, pp 295 – 314.
(8) Just, G. H.; Smith, K.; Joy, K. H.; Roy, M. J. (2020): Parametric review of existing regolith excavation techniques for lunar In SituResource Utilisation (ISRU) and recommendations for future excavation experiments. In: Planetary and Space Science 180 (4), p 104746. DOI: 10.1016/j.pss.2019.104746.
(9) Mueller, R. P.; Smith, J. D.; Schuler, J. M.; Nick, A. J.; Gelino, N. J.; Leucht, K. W. et al. (2017): Design of an Excavation Robot: Regolith Advanced Surface Systems Operations Robot (RASSOR) 2.0. DOI: 10.1061/9780784479971.018.
(10) Zacny, K.; Mungas, G.; Mungas, C.; Fisher, D.; Hedlund, M. (2008): Pneumatic Excavator and Regolith Transport System for Lunar ISRU and Construction. AIAA Space 2008 Conference & Exposition. AIAA SPACE 2008 Conference & Exposition. San Diego, California. (Reston, Va.): (American Institute of Aeronautics and Astronautics), p 456, zuletzt geprüft am 27.05.2021.
(11) Mueller, R.; Smith, J. D.; Lippitt, T.; Schuler, J.; Nick, A. (2013): Reducing extra-terrestrial excavation forces with percussion. IEEE Aerospace Conference, 2013. 2 – 9 March 2013, Big Sky, Montana. 2013 IEEE Aerospace Conference. Big Sky, MT, 3/2/20132 – 3/9/2013. Institute of Electrical and Electronics Engineers; IEEE Aerospace Conference. Piscataway, NJ: IEEE, pp 1 – 11, zuletzt geprüft am 27.05.2021.
(12) Radl, A.; Milicevic Neumann, K.; Wotruba, H.; Clausen, E.; Friedrich, B. (2022): From lunar regolith to oxygen and structural materials: an integrated conceptual design. In: CEAS Space J. DOI: 10.1007/s12567-022-00465-w.
(13) Esthiaghi, P.; Bauer, S.; Ede, D.; Hamann, P.; Harthaus, F.; Illgner, S. et al. (2021): Scraper Inspired Lunar Excavation Rover. Luxembourg.
(14) MoonAixperts e.V. (Hg.) (2022): Moon Aixperts. Online verfügbar unter www.moonaixperts.de/de, zuletzt geprüft am 30.11.2022.