Author: Dr.-Ing. Dipl.-Wirt.-Ing. Felix Lehnen, Oberingenieur am Institute of Mineral Resources Engineering (MRE), RWTH Aachen University, Aachen/Germany
1 Introduction
Mine rescue teams world-wide are facing various challenges and are prepared for diverse tasks (1, 2). Regular duties are first aid, fire-fighting, or the work in hazardous atmospheres. Out of this variety of duties, this paper deals with the scenario of long-lasting entrapments. Such incidents have occurred and have been solved over decades. However, more than 95 % of such cases took place not deeper than 1,500 m. Mining in the 21st century goes deeper. Great depths make the scenario of trapped miners a major and even more complex rescue mission than ever before. That is especially the case for a considered worst case which would be a total blockage of any access to the underground.
The European I2Mine project has faced this overall challenge of great depth and developed “Innovative Technologies and Concepts for the Intelligent Deep Mine of the Future”. Here, great depth has been defined as deeper than 1,500 m. Throughout five years, research in various fields of mining engineering and technology has been conducted by a multi-national network. One task focused on the scenario of miners trapped underground at great depth. This task of “deep mine rescue” was conducted at RWTH Aachen University in cooperation with Sweden’s TU Lulea and Dräger Safety AG & Co. KGaA, Lübeck/Germany.
This paper addresses the question whether today’s mine rescue technology is applicable at great depth. The according assessments will focus on the key technologies during a rescue of trapped miners. The first challenge would be to locate the trapped miners and to establish a means of communication to them. To ensure the physical and psychological survival over an extended period of time, the supply of nutrition, materials, medicine etc. is then of outmost importance. Both supply and rescue of the miners may rely on deep drilling operations which define the total duration of the rescue mission.
Having identified technical borders due to great depth, this paper presents feasible updates as well as organizational alternatives to critical technology. Recommendations are provided for an effective application. Furthermore, clear recommendations for further research and development activities are given with respect to the overall scenario of miners trapped underground. Thus, this paper contributes to improved preparedness for a major mine rescue mission in Europe and abroad.
1.1 Entrapments
The rescue of trapped miners is a rather rare mission for mine rescue teams. However, these incidents can lead to complex and long-lasting missions. The “miracle of Lengede” (1963) is still present to a lot of people in Germany. The rescue of the 33 miners in Chile (San José 2010) even got world-attention. Long-lasting rescue missions of this type are shown in red colour in Figure 1. In contrast, the yellow and green coloured scenarios are more of routine character to mine rescue teams.

Fig. 1. Classification system for major mine rescue missions (after 3). // Bild 1. Klassifizierungsschema für großangelegte Grubenwehreinsätze (nach 3).
Especially major roof collapses and inundations can cause such entrapments. These incidents can destroy or block miners’ escape-ways underground. If that affects the only means of escape, miners can become trapped underground. Although modern mining operations follow the general principle of providing a second means of escape, dead-end situations still have to be considered (3). Especially the classic mine development work in road-heading poses that situation by its very nature.
Mine development work is an integral part of every underground mining operation. Especially exploration drifts may form long dead-ends without any alternative escape-way. Furthermore, certain modern mining operations apply single drifts for preparing or under- and over-cutting defined parts of the deposit. Such drifts in sub-level caving or stoping operations are shorter than the aforementioned exploration drifts but still pose the hazard of a dead-end.
1.2 Great Depth
Increasing depth is a global trend in mining. World-wide, the deepest mines operate at 4,000 m in South Africa whereas Canada is mining at 3,000 m (4). Europe’s deepest mines (4)are Ibbenbüren (hard coal, Germany), Pyhäsalmi (copper/zinc, Finland), and Sigmundshall (potash, Germany). They currently operate at about 1,500 m. When mines expand into greater depth, the complexity of their underground workings rises. A more complex human-nature system also holds increased uncertainty regarding H&S-related variables such as fire-loads, escape-ways or ventilation networks.
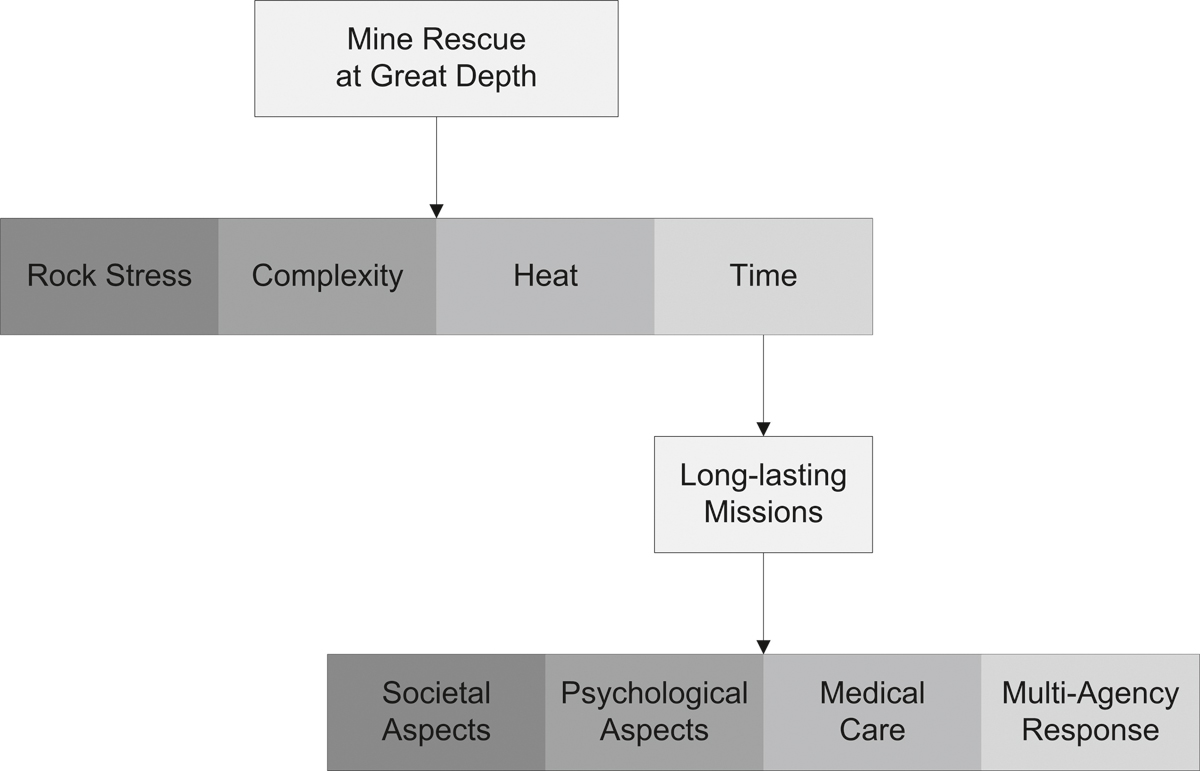
Fig. 2. New dimensions for mine rescue as a result of great depth (after 4). // Bild 2: Einfluss großer Teufen auf die Komplexität von Grubenwehreinsätzen (nach 4).
Taking the introduced scenario of miners trapped underground into consideration, especially the expected increase of the overall mission duration poses new dimensions to mine rescue. Figure 2 compiles the influence of great depth on the complexity of mine rescue. It can be seen that great depths create significant challenges which go beyond today’s state of the art in mine rescue technology and strategies.
1.3 Worst Case Consideration
Mine rescue drilling from surface has to be seen as the worst case for scenarios at great depth due to their long and life-critical duration. In such situations, the depth of the trapped miners directly influences the necessary technical approaches during the rescue mission. Thus, mine rescue teams try to use any safe access to go underground whenever possible. Starting a rescue mission like drilling underground instead of on surface can save valuable time. European underground mines commonly provide at least two independent connections (shafts, adits, ramps) to the surface. These act as independent means of escape for the miners and as emergency access points for mine rescue teams.
If safe and accessible, going underground would also be the first rescue strategy with respect to entrapments. This option makes the rescue almost independent from the actual depth. E. g. if only one sublevel collapses, neighbouring sublevels might be the closest access points for mine rescue teams underground. The vertical distance of sublevels within European caving and stoping operations usually is about 20 to 40 m (4). An alternative to vertical drilling is horizontal road heading, e. g. re-driving a collapsed roadway. However, the following considerations focus on the worst case assumption of a rescue mission starting on surface.
2 Mine Rescue Technology
Major mine rescue missions rely on several technical steps (Figure 3). First, the trapped miners have to be located and communication to them has to be established. Having identified their location, drill holes are prepared to first supply and second rescue the trapped miners. While waiting for communication and supplies, the trapped miners have to sustain underground. Their survival might be supported by special rescue chambers as a preventive measure.

Fig. 3. Major technical steps during a rescue of trapped miners. // Bild 3: Technische Hauptmaßnahmen zur Rettung verschütteter Bergleute.
2.1 Location and Communication
Major mine emergencies generate significant demand for information. The mine rescue management on surface needs to know whether critical mine infrastructure is still running, what kind of hazardous gases occur or if rock stability is affected. Whenever miners are still underground, the most crucial information would be the exact location of those trapped miners. In a second step, a means of communication has to be established to those miners. Within this paper, these two important technological challenges of locating and communicating are regarded as one major technical step, since considerable overlapping can be seen in the related technological challenges and solutions.
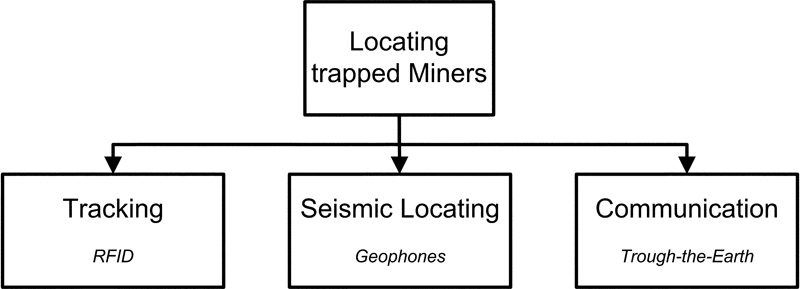
Fig. 4. Technical options to locate miners trapped underground (after 4). // Bild 4. Technische Ansätze zur Ortung verschütteter Bergleute (nach 4).
Figure 4 distinguishes three principal ways of locating trapped miners. The easiest way would be a direct communication like telephone or radio calls. The required infrastructure may however be destroyed by the initial event which leads to the need for special through-the-earth (TTE) emergency communication. Without any voice communication, the detection of seismic signals from the trapped miners may remain as the classic way of locating miners. An alternative approach is tracking of miners during their regular work as it can be achieved by modern, wireless technology.
Under the impression of fatal mine accidents in the U.S. 2006, the so-called Miner Act led to American research efforts in mine safety, also with a particular focus on tracking and two-way communication systems. A clear need for research has been identified but still remains in that stage of recommendations since then (5). The approach within I2Mine was to specify that need for research after an assessment of the state of the art against the global challenge of great depth. In addition, Figure 4 represents the derived recommendation to apply parallel tactics and opportunities to locate miners trapped underground whenever possible. In the following, the three main strategies of tracking, seismicity and communication are described and assessed in more detail.
2.1.1 Tracking
Information technology (IT) is rapidly changing, in everyday life as in underground mines. Underground, wireless point-to-point and mesh networks are currently replacing leaky feeder and cable-based networks (6). Such existing networks of mines’ infrastructure can also be used for a real-time tracking of machinery and personnel: Radio frequency identification (RFID) tags or Wifi-applications send ultra-high frequency (UHF) signals to several readers. That allows a relatively accurate tracking and location when such data is projected on mine plans.
To send the short signal, the tags need a source of energy which might be taken from the cap lamp’s battery. The range of such mobile RFID units is about 100 m (7). The signals are received by a fix mesh network of nodes and modems. While the transmission of the signal from point to point is wireless, the power supply of the needed transceiver – a combination of transponder and receiver – is often relying on power cables. An innovative approach in underground tracking technology is reverse RFID. Here, the miners carry small, more expensive mobile readers which communicate to fixed tags (8).
Cable connections and IT might be interrupted or destroyed after major incidents. However, a log on surface will be able to show the lastly stored data when needed. This last known location of miners underground would be valuable information for mine rescue teams on surface. However, tracking of people in their day-to-day work is sometimes criticized as surveillance. But “use only in case of emergency” mechanisms would be feasible. Tracking data might be separately stored and only un-locked by a workers’ representative in case of emergency. When not needed, such personal data could be deleted after a short period of time without any interpretation.
2.1.2 Seismic Locating
Seismic location systems are based on the surface detection of signals sent by the miners trapped underground. The resulting seismic waves can be detected by geophones and the evaluation of time differences can then be processed to locate the trapped miners. A high number and distribution of geophones on surface increase the chance and the accuracy of location. Even if the strength or reception of signals does not allow an exact location, detecting signals can at least provide a proof of survival and thus motivate further mine rescue efforts and strategies.
Experimental research indicates that the maximum detectible depth for such seismic signals from the underground to surface ranges from 600 m (9) to 800 m (10). This distance might be increased from surface by placing geophones in boreholes (11). Besides depth, seismic location systems are of limited use in scenarios of dead or severely injured miners who are physically not able to send any signals to surface.
2.1.3 Communication
Communicating with miners trapped underground is the most obvious way to locate them. Furthermore, means of communications are again of importance after the location and until the final rescue. One can distinguish two general types of technical mine communication systems. The primary systems comprise conventional ultra-high frequency (UHF; 150 MHz to 6 GHz) radio handhelds which are based on leaky feeders or node-to-node networks (12). Secondary communication provides alternatives for emergencies by non-wearable large antennas using medium frequency (MF; 300 kHz to 3 MHz) or TTE systems at very low frequencies (VLF; 10 Hz to 5 kHz) (12).
Primary communication systems like radio and telephone are mandatory infrastructure in today’s underground mines. They all rely at some point on cables or wire. To increase stability and survivability it might be thinkable to place phone cables under the floor of mine road ways and to protect telephones by solid boxes or refuge chambers (13). Leaky feeder systems use “coaxial cables that are able to emit, i. e. leak, and receive, i. e. feed radio signals” (14). They have the advantage of being used by normal hand-held radios which on the other hand again rely on a source of power, e. g. a limited battery.
An arising trend in underground emergency communication is the use of Medium Frequency (MF). MF requires much less active radio elements than leaky feeders. Furthermore, a “parasitic propagation” allows the radio signal to propagate via broken power cables or other metallic parts of the remaining mine infrastructure. On the other hand, the needed radios and antennas are much heavier than normal radios and are therefore only usable as emergency sets, e. g. for the work in dead-ends (7). Both, parasitic propagation and also simple seismic signals could be facilitated by providing solid steel bars on the floor of dead-end drifts. They could be simply installed as a preventive measure during the development of a drift.
Direct wireless communication from surface teams to underground miners would solve both the communication and the location challenge. Such TTE communication can be achieved by extremely low electromagnetic waves or fields through the rock. Some hundred meters of rock can be penetrated with a loop antenna on surface and a power source of 1.5 kW (15). Since such an energy source cannot be considered as available in underground emergency situations, only one-way messaging (paging) can be seen as state of the art. Simple one-way text messaging is feasible using the personal emergency device (PED). The Canadian MineTrex emergency communication system allows mine rescue teams to connect to remaining infrastructure. VitalAlert’s Canary system even enables two-way communication through up to 300 m of rock (4).
The antenna length is proportional to the systems’ capability. Also lower frequencies allow greater distances but reduce the achievable quality and content of a message at the same time. The maximum vertical depth is 600 m reached by a Lockheed Martin prototype in the USA. The test focused on a simple text message via a digital large loop magnetic field (16). Besides distance (depth), also the conductivity of the rock type and different sources of electrical noise influence the performance of TTE. Thus, two-way TTE communication cannot be considered as feasible at the moment with respect to great depth. However, it is another option to be applied when sending signals through boreholes or to connect to undamaged parts of underground communication infrastructure. Special equipment would have to be kept by every miner working in a dead-end as a personal preventive measure.
2.1.4 Alternative Locating
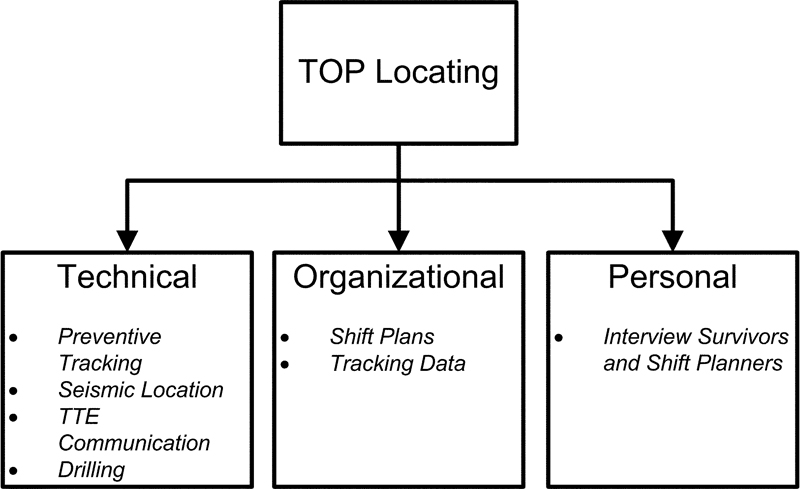
Fig. 5. Technical, organizational and personal approaches to locate trapped miners (4). // Bild 5. Technische, organisatorische und personelle Maßnahmen zur Ortung Verschütteter (4).
Tracking, seismic location and communication are technical approaches to locate miners trapped underground. In addition, great depths, unforeseen events and the vulnerability of technical equipment require alternatives ready to use in emergency. Besides technical also organizational and personal (TOP) measures must be considered. Figure 5 transfers this general Health & Safety principle of TOP to the field of locating trapped miners:
With respect to technology, also drilling has proven to be a successful location method. Drilling operations shall be prepared by considering organizational and personal search indicators as much as possible: Shift plans and recorded tracking data can be used to determine the most probable location of trapped miners. In case of inundation or hazardous gases, also survivable spots in inclining dead-ends, which can form air pockets, can be identified by mine plans and local mining engineers. In Lengede, the trapped miners themselves used compressed air lines to create Morse signals on surface manometers by systematically opening and closing valves underground (4). Furthermore, survivors who have been able to escape the mine shall be interviewed as soon as possible to get further information regarding the situation and potential entrapments underground.
2.2 Mobile Rescue Chambers
When no escape-way is available, emergency provisions and a safe shelter are crucial preventive measures to safe miners‘ lifes while they have to wait for rescue. The previous scenario assessments have proven a risk for entrapments especially in dynamic road heading operations. Thus, considerations for innovative rescue chambers have been prepared and published at the AIMS 2015 conference in Aachen/Germany (17). The idea is that small and mobile chambers fit in typical cross-sections and do not disturb everyday work in road heading. Accordingly, they can be placed very close to the face and thus cover for the maximum range of the dead-end situation. Furthermore, they are mobile and easily follow the heading throughout the shifts.
As derived, long-duration rescue missions hold unknown dimensions. Regarding miners trapped underground, three important time frames are distinguished: The time until the first (communication) contact is achieved, the time until supplies can be delivered, and the time until the final rescue. Consequently, the second time frame is life-critical, since the miners have to physically survive it without any support from surface. The Xinqiao rescue (China, 2009) set a world-record of 25 days until first communication and supplies could be provided (3).
Being trapped underground causes immense stress by psychological, social and environmental (habitat) stressors and effects (18). Important know-how has been transferred from comparable isolation studies in research fields of long-duration space flight and Antarctic overwintering missions to prepare an innovative rescue chamber for psychological coping. Trapped miners as a team and the provision of communication from surface are crucial to fight the effects of isolation. Countermeasures against monotony – watching the same environment, tasting a small variety of food, etc. for a long time – can be achieved by the chamber’s design and provisions.
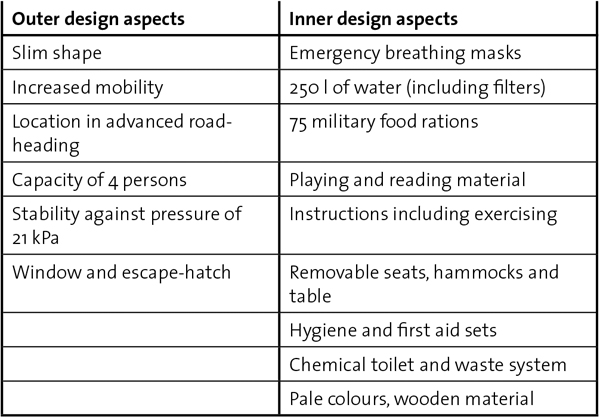
Table 1. Aspects in re-designing mobile rescue chambers (after 17). // Tabelle 1. Zusammenstellung anzupassender Design-Parameter für mobile Rettungskammern (nach 17).
Thus, mobile rescue chambers can be modified and applied accordingly. The findings of integrated and innovative concepts for mobile rescue chambers can be found in the according paper (17). Table 1 compiles identified key design aspects. “Outer” features like mobility set requirements for the construction of the chamber. “Inner” design aspects describe features supporting nutrition and psychological issues. Taking these suggestions into account, re-designed and re-equipped mobile rescue chambers can provide cost-efficient support for miners trapped underground.
2.3 Small- and Large-Diameter Drilling
There are two types of mine rescue drilling operations: Small diameter (< 10 cm) pilot holes are drilled to locate, contact and support the trapped miners. Large diameter (> 40 cm) rescue drill-holes are prepared to actually free trapped miners. Drilling deeper than 2,000 m is – in general – technically feasible with both small and large diameters (4). The challenge with respect to the entrapment scenario arises with the corresponding drilling time: The time until first contact via the pilot drill hole is established is physically life-critical, since the trapped miners have to survive this time span without any external support. The drilling time of the large-diameter rescue hole determines the total duration of the overall rescue mission.
Industry provides a variety of drilling technologies available to conduct such rescue missions. Mine rescue can benefit from profit-oriented applications like oil and gas winning, geothermal energy, water wells and mineral exploration. These branches undergo ongoing research, development, and thus continuous improvement. Another trend is that some mining countries purchase special mine rescue drilling equipment for central use of their national or provincial mine rescue stations: South Africa chose American Schramm equipment that also succeeded in the rescue of the Chilean miners in 2010. Both the T685 WS for pilot holes and the T130 XD for rescue holes can be considered as best available technology (19). China purchased universal German Bauer mobile rigs that allow the application of all prevalent drilling techniques. Its maximum depth is stated as 3,000 m for pilot holes and 1,500 m for rescue holes. Such mobile drilling rigs would also be a suitable joint European preventive measure.
Both, the choice of the right equipment as well as the feasible drilling rate (speed) highly depend on the geological circumstances of the individual site. A performance analysis of past rescue missions shows a range of 0.3 to 33 m/h and an average drilling rate of 9.1 m/h (3). However, there is only one mine rescue mission in history which occurred at a depth of several 100 m and where mine rescue teams had to choose surface drilling as there only applicable strategy: the San José mine rescue in Chile 2010. At San José, a reverse circulation hammer enabled first contact after 17 days with a 14 cm borehole. The 71 cm rescue borehole was drilled by widening a pilot drillhole in two steps. Cuttings of about 700 t were removed by the trapped miners in shift work underground. This large diameter rescue drilling took another 34 days (3). Projecting the data of a 700 m rescue to a great depth of 2,000 m, first contact would be established in 49 days and the actual rescue would take another 97 days.
Besides geology, water as in a flooded mine creates another major challenge to mine rescue drilling. Trapped miners can survive in an air pocket that might build up in an inclined and sealed spot within the inundated mine. Consequently, this over-pressurized atmosphere has to be maintained during the drilling process since this natural barricade against the water level is essential for survival. After the rescue, a slow decompression process is necessary when the miners are finally lifted from this artificial atmosphere (20).
Since mine rescue drilling is life-critical and accordingly time-critical, certain lessons and principles (after 4) should be followed whenever this worst case scenario occurs:
- Experts, e. g. from the oil and gas industry, have to be involved immediately.
- One person should be assigned responsible and authorized for the management of all drilling operations.
- Identification of possible locations of the trapped miners and thus the drilling spots shall be based on technical, organizational, and personal (TOP) locating strategies.
- Preparation of the drilling site should already be finished when the drilling equipment arrives at the mine.
- The small-diameter pilot drill is life-critical and has thus top-priority for the entire mission.
- Geological and technical uncertainties require redundant drillings.
- Even with uncertain information, an early start of drilling has positive psychological effects for the trapped miners, since they can hear or feel that a search and rescue mission is conducted.
- Also the large-diameter drill can be started early to gain information and experience regarding drillability at the site’s geology (21).
- In addition, misled rescue drillings can be used for mine rescue teams to gain access to intact parts of the underground mine (22).
- Pre-selection of possible drilling points and appropriate (and available) drilling equipment for the site-specific geology should be carried out by every mining company before any major mine accident occurs.
3 Conclusion and outlook
Long-lasting scenarios are a rare and challenging scenario in mine rescue. Entrapments have to be considered even in future mining operations. Great depths can convert such scenarios into complex rescue missions of unknown dimensions. Long-lasting missions lead to psychological and physiological burdens regarding the survival of trapped miners until rescue. Technical measures are needed to locate the trapped miners, to communicate with them, and to finally free them. Furthermore, tracking and drilling technology have to meet the global challenge of great depth.
Technology assessments indicate clear boundaries of today’s technology with respect to great depth. An urgent need for research can be seen in long-distance TTE communication and tracking as well as in fast, universal, and precise drilling technology. Parallelization and redundancy are of outmost importance whenever life-critical operations rely on certain technology. Alternatives such as the TOP principle have been introduced. A potential preventive measure is presented by a low-cost design concept for future mobile rescue chambers. They can support psychological and physical survival in entrapment situations that are most likely to occur in dynamic road heading operations.
Besides such technical considerations, the European I2Mine project has also put research efforts into organizational tools and management systems for such complex mine rescue missions. An online prototype has been built at RWTH Aachen University that shows the potential of a European Mine Rescue Platform (EMRP). EMRP would allow the European mining industry to cost-effectively share know-how and special equipment for rare incidents. Furthermore, the author has prepared his Ph.D. thesis on “Mine Rescue Management” (3). Based on case studies and disaster management approaches, a management concept and guideline has been developed to organizationally prepare and logistically manage a long-lasting rescue missions for miners trapped underground.
4 Acknowledgements
Research within the I2Mine project has partly been sponsored by the European Union’s Framework Programme 7 (GA # NMP2-LA-2011-280855). I have to thank Prof. Dr.-Ing. Jürgen Brune, Colorado School of Mines, Prof. Dr.-Ing. Ludger Rattmann, THGA Bochum, and Prof. Dr.-Ing. Walter Hermülheim, TU Clausthal, for the creative discussions we shared. Prof. Dennis Pettersson, TU Lulea, invited me to arrange a design workshop on rescue chambers with Swedish students. Last but not least I would like to thank Prof. Dr.-Ing. Bernd Lottermoser, RWTH Aachen, for the critical review of this manuscript.
References / Quellenverzeichnis
References / Quellenverzeichnis
(1) Hermülheim, W.; Bresser, G.; Fuchs, E.; Langer, G.; Ollesch, E. u. Junker, M.: Handbuch für das Grubenrettungswesen im Steinkohlenbergbau. VGE-Verlag Essen, 2007.
(2) Ramlu, M. A.: Mine disasters and mine rescue. Universities Press Hyderabad, 2007.
(3) Lehnen, F.: Mine Rescue Management. A Concept for Long-Lasting Missions based on Case Study Analysis and Disaster Management Approaches. Dissertation, Aachen 2016.
(4) Lehnen, F.: Concepts for deep mine rescue, Deliverable 6.7 of the European I2Mine Project, 2016.
(5) Robinson, B.: Mine Emergencies. Training and technology can prevent underground disasters. Mining, People and the Environment (2013) 2, S. 22.
(6) Buchsbaum, L.: Unhooking the cables. Mining Magazine (2014) 1, S. 26 – 28.
(7) Tutorial on Wireless Communication and Electronic Tracking. Part 1: Technology Overview. NIOSH Mining Safety and Health Content, National Institute for Occupational Safety and Health, 2011.
(8) Reverse Implementation of Radio Frequency Identification (RFID) Technology for Personnel Tracking in Underground Mines. Technology News Nr. 543, National Institute for Occupational Safety and Health, 2011.
(9) Development of a Seismic System for Locating Trapped Miners. Final Technical Report. NIOSH Broad Agency Announcement (BAA) 2011-N-13046, Heasley, K. A., 2013.
(10) Opitz, P.: Erprobung von Systemen zur Ortung verschütteter und eingeschlossener Bergleute in Bergbaubetrieben der DDR. Neue Bergbautechnik 19 (1989) 5, S. 177 – 179.
(11) Jakeman, M.: Developments in self escape and aided rescue arising for the Moura No.2 Wardens Inquiry by the Joint Coal Industry Committee from Queensland and New South Wales. Coal Operators‘ Conference. Proceedings. 1998, S. 718 – 756.
(12) Waynert, J.: Communications, Tracking, & Data Integration. Research Priorities. Alpha Foundation Priorities Planning Meeting. Proceedings. 2012.
(13) The Sago Mine Disaster. A preliminary report to Governor Joe Manchin III, McAteer, J. D., Bethell, T. N., Monforton, C., Pavlovich, J. W., Roberts, D. C. u. Spence, B., Buckhannon 2006.
(14) Schafrik, S. J.; Dietrich, C. u. Harwood, C.: Geolocation for underground coal mining applications. Classification of systems. Mining Engineering 66 (2014) 4, S. 22 – 48.
(15) Markham, A. u. Trigoni, N.: Magneto-Inductive Networked Rescue System (MINERS). Taking Sensor Networks Underground. 2012 ACM/IEEE 11th International Conference on Information Processing in Sensor Networks (IPSN). Proceedings. Piscataway, NJ: IEEE 2012.
(16) Yenchek, M. R.; Homce, G. T.; Damiano, N. W. u. Srednicki, J. R.: NIOSH-Sponsored Research in Through-the-Earth Communications for Mines. A Status Report. IEEE Transactions on Industry Applications 48 (2012) 5, S. 1700 – 1707.
(17) Lehnen, F.; Rattmann, L. u. Martens, P. N.: Mobile Rescue Chamber Re-Design to Support Miners Trapped Underground. 5th International Symposium „Mineral Resources and Mine Development“. Aachen International Mining Symposia (AIMS), Bd. 14. 2015, S. 235 – 246.
(18) Salam, A. P.: Exploration Class Missions on Earth: Lessons Learnt from Life in Extreme Antarctic Isolation and Confinement. In: Chouker, A. (Hrsg.): Stress Challenges and Immunity in Space. Springer-Verlag Berlin/Heidelberg, 2012, S. 425 – 439.
(19) Klerk, C. de: Improved Rescue Technologies at Mines Rescue Services. South Africa. 6th International Mines Rescue Body Conference. Conference Papers and Presentations. 2013.
(20) Frauendorf, H. u. Gelbrich, W.: Spezielle Probleme der Versorgung und Bergung bei bergmännischen Rettungsbohraktionen. Teil 3. Bergakademie 20 (1968) 2, S. 94 – 98.
(21) Hibbard, W. R.; Chambers, A.; Giel, B. G.; Hair, G.; Keller, G. V.; Lederer, J.; Maurer, W. C.; Talman, W. G.; Williamson, T. N. u. Meloy, G. E.: Mine Rescue and Survival. Final Report. National Academy of Engineering Washington D.C.,1970.
(22) Dittrich, R. u. Nemitz, R.: Bohrungen für den Bergbau zur Rettung von Menschenleben. Bergbau 19 (1968) 9, S. 229 – 238.
Author: Dr.-Ing. Dipl.-Wirt.-Ing. Felix Lehnen, Oberingenieur am Institute of Mineral Resources Engineering (MRE), RWTH Aachen University, Aachen/Germany