1 Einleitung
Die Grundlage zur Vision einer digitalen Mine und somit von Bergbau 4.0 ist zum einen die vernetzte Kommunikation der Maschinen untereinander und zum anderen eine möglichst autonome Arbeitsweise der Maschinen. Elementarer Bestandteil auf dem Weg zur Automatisierung ist die Bestimmung der aktuellen Position der Maschinen zu jedem Zeitpunkt (1). Sowohl von der Schwerindustrie als auch vom Bergbau wurde in den vergangenen Jahren die Anforderung eines präzisen Lokalisierungssystems für geschlossene Räume formuliert. Entsprechend dem Bericht „Global Indoor Location Market Outlook 2019“ wird erwartet, dass der Markt für Indoor Lokalisierungssysteme (IPS) von 597 Mio. US-$ im Jahr 2014 auf knapp 4 Mrd. US-$ im Jahr 2019 anwachsen wird (2). Dementsprechend gibt es neben dem technischen auch einen wirtschaftlichen Anreiz, dieses Thema zu verfolgen.
Auf unterschiedlichen Technologien basierend wurden in der Vergangenheit verschiedene Indoor Lokalisierungssysteme entwickelt. Sie unterscheiden sich hauptsächlich im Hinblick auf Genauigkeit, Kosten, Skalierbarkeit, Robustheit und Sicherheit voneinander (3). Nicht jede dieser Technologien ist jedoch bergbautauglich. Abgesehen von den herausfordernden Umgebungsbedingungen sind vor allem die beengten Verhältnisse unter Tage ein Problem.
In diesem Artikel werden die Ergebnisse verschiedener Untersuchungen des Instituts für Maschinentechnik (IMR) der Rheinisch-Westfälischen Technischen Hochschule (RWTH) Aachen in diesem Bereich aufgezeigt. Allen voran wird die Ultra-Breitband Funktechnologie (UWB) als eine der vielversprechendsten Technologien vorgestellt. Drei verschiedene praktische Anwendungsfälle, bei denen die Tauglichkeit nachgewiesen wurde, werden dabei betrachtet. Des Weiteren wird ein neuer Ansatz zur Verbesserung der Systemleistung, die sogenannte Sensorfusion, präsentiert. Dabei werden die Informationen, die mittels UWB gewonnen werden, mit Daten aus anderen Systemen, wie beispielsweise einem inertialen Navigationssystem (INS), fusioniert. Die Entwicklung eines solchen Echtzeitsystems zur Positionsbestimmung mittels Sensorfusion wird im von der EU finanzierten Forschungsprojekt Real-Time Mining vorangetrieben. Die Intensivierung der Forschungs- und Entwicklungstätigkeiten erfolgt im ebenfalls von der EU finanzierten SIMS Projekt. Abschließend wird ein weiteres öffentliches Projekt mit dem Kooperationspartner GTA Maschinensysteme GmbH, Hamminkeln, skizziert, in dem ein Positionierungssystem auf Basis von UWB für einen Betonspritzarm entwickelt wird.
2 Die Ultra-Breitband Funktechnologie (UWB)
2.1 Physikalische Grundlagen
Die UWB ist eine Technologie zur Nahbereichsfunkübertragung. Die Datenübertragung wird durch impulsförmige, breitbandige Radioimpulse realisiert. Diese Wellenform wurde erstmals im Jahr 1887 von Heinrich Hertz erzeugt. In den folgenden Jahren wurde jedoch hauptsächlich an schmalbandigen Funksystemen geforscht, was auf die einfachere technische Umsetzung dieser Wellenform zurückzuführen ist. Erst weitere Entwicklungen auf dem Gebiet der breitbandigen Funkwellenerzeugung aus den 1990er Jahren sowie die Entscheidung der „Federal Communication Commission“ aus den USA, den Frequenzbereich von 3.1 GHz bis 10.6 GHz für die UWB-Technologie freizugeben, verhalfen der Technologie zu neuem Aufschwung (4, 5, 6).
Charakteristisch für die UWB-Technologie im Vergleich zu anderen Funktechnologien ist die Verwendung eines sehr großen Frequenzbereichs. Kurze Signalimpulse werden in einem Frequenzbereich von 500 MHz bis hin zu mehreren GHz ausgesendet. Mit steigender Bandbreite steigt auch die zu realisierende Datenübertragungsrate, wobei gleichzeitig der Energiegehalt der einzelnen Frequenzen sinkt. Die gesamte Sendeleistung eines UWB-Systems im Frequenzbereich von 3.1 GHz bis 10.6 GHz ist auf 1 mW limitiert. Aufgrund dieser geringen Energiedichte bei den einzelnen Frequenzen werden andere Funksysteme, deren Frequenzbereich sich mit dem des UWB-Systems überschneiden, nicht gestört (6, 7).
Einige Vorteile der UWB-Technologie im Vergleich zu anderen Funksystemen im Einsatz als Lokalisierungssystem sind die einfache Hardware, der geringe Einfluss von Interferenzen anderer Funksysteme und die Resistenz gegenüber Multipfad-Effekten (8, 9, 10). Multipfad beschreibt dabei das physikalische Phänomen der Reflektion von ausgesendeten Funkwellen bei der Datenübertragung in geschlossenen Räumen. Beim Empfänger kommen somit mehrere zeitlich versetzte Funkwellen an, die jedoch durch einen einzelnen Impuls erzeugt wurden. Bei herkömmlichen Funksystemen führen diese Überlagerungen der Wellen zu Interferenzen, die zu einer verminderten Datenübertragungsrate bzw. zu Fehlern bei der Datenübertragung führen. Insbesondere in industriellen Umgebungen, wo in der Regel Beton und Stahl verbaut sind, kommt dieser Vorteil der UWB-Technologie zum Tragen.
Neben der sicheren und effizienten Datenübertragung stellt die Lokalisierung von mobilen Empfängern einen weiteren Anwendungsfall der UWB-Technologie dar (11). So können mobile Maschinen in widrigen Umgebungsbedingungen, wie sie z. B. in einem Bergwerksbetrieb unter Tage vorherrschen, sicher lokalisiert werden. Tests haben gezeigt, dass eine sichere Datenübertragung und Lokalisierung über eine Distanz von 200 m unter schwierigen Umgebungsbedingungen problemlos realisiert werden kann.
2.2 Lokalisierungsverfahren mit UWB
Die Lokalisierung mittels UWB erfolgt durch die Verwendung mehrerer UWB-Module. Dabei wird die Position eines mobilen Moduls relativ zu mehreren fest installierten Modulen, sogenannten Ankern, bestimmt. Für eine zweidimensionale Lokalisierung in einer definierten Ebene werden mindestens drei Anker benötigt. Für eine dreidimensionale, also räumliche Lokalisierung, werden vier Anker benötigt. Oft kann die Anzahl der benötigten Module bei praktischen Anwendungsfällen durch Plausibilitätsbetrachtungen reduziert werden.
Die im Folgenden beschriebenen Varianten der Lateration stellen einen Auszug aus diversen Verfahren zur Lokalisierung von mobilen Modulen dar. Das Laterationsverfahren basiert auf der Messung von Strecken zwischen einem mobilen und mehreren fest installierten Basisstationen. Im Gegensatz dazu wird bei Angulationsverfahren der Winkel zwischen den Sendern und Empfängern zur Lokalisierung verwendet. Die Distanz zwischen Sender und Empfänger wird über die Messung der Signallaufzeit der ausgesendeten Wellen bestimmt. Zwei gängige Methoden zur Bestimmung der Position sind „Time-of-Arrival“ (TOA) und „Time-Difference-of-Arrival“ (TDOA).
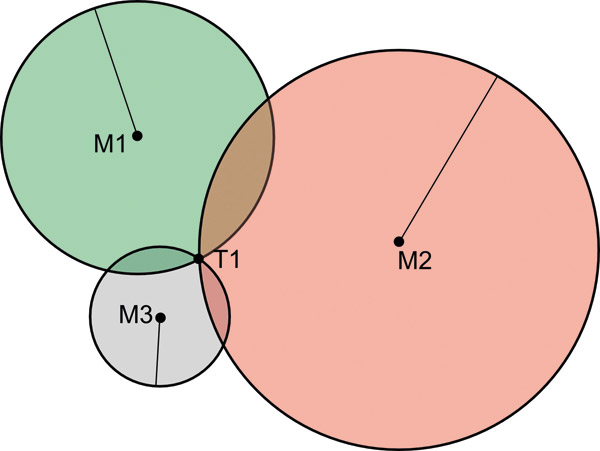
Fig. 1. Schematic representation of the lateration procedure with base stations M1 – M3 and the desired position T1. // Bild 1. Schematische Darstellung des Laterationsverfahren mit Basisstationen M1 – M3 und der gesuchten Position T1. Source/Quelle: IMR
Bei der TOA-Methode wird die Distanz zwischen Sender und Empfänger zur Lokalisierung verwendet. Über die bekannte Signalausbreitungsgeschwindigkeit des gesendeten Impulses und einer Messung der Signallaufzeit kann die Distanz zwischen dem mobilen Modul und der Basisstation errechnet werden. Schematisch ist die Lateration in Bild 1 dargestellt. Um jede der Basisstationen (M1 – M3) kann ein Kreis – bzw. für die räumliche Lokalisierung eine Kugel – mit dem Radius der errechneten Abstände definiert werden. Der Schnittpunkt T1 dieser Kreise bzw. Kugeln beschreibt die aktuelle Position des mobilen Moduls. Durch den Einsatz von mehr Basisstationen als mindestens nötig erhält man ein überbestimmtes Gleichungssystem
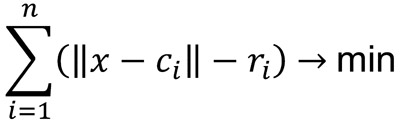
mit x als Position des mobilen Moduls T1, ci der Position der Basisstationen M1 – M3 und ri der gemessenen Strecken zwischen den Basisstationen und dem mobilen Modul. Die Berechnung der Lösung der Gleichungssysteme mittels der Methode der kleinsten Quadrate liefert daraus resultierend die Position des mobilen Moduls.
Diese Vorgehensweise setzt voraus, dass die Uhren aller Stationen exakt synchronisiert sind. Sollte eine ausreichende Synchronisierung nicht möglich sein, muss das Verfahren um weitere Methoden ergänzt werden, die diesen zeitlichen Versatz ausgleichen. Hierzu können das „Two-Way-Ranging“-Verfahren (TWR) bzw. das „Symmetric-Sided-Two-Way-Ranging“-Verfahren (SDS-TWR) verwendet werden (12).
Bei der TDOA-Methode wird nicht die absolute Laufzeit zwischen dem mobilen Tag und einer Basisstation verwendet, sondern es wird der Laufzeitunterschied zwischen dem mobilen Tag und den einzelnen Basisstationen gemessen. Dazu müssen lediglich die einzelnen Basisstationen zeitlich exakt synchronisiert sein. Die mobile Station sendet einen einzelnen Impuls aus, der von den jeweiligen Basisstationen je nach Entfernung zu einem anderen Zeitpunkt empfangen wird. Anhand der Laufzeitunterschiede kann die Position des mobilen Moduls bestimmt werden. Im Gegensatz zur TOA-Methode wird bei der TDOA-Methode mathematisch gesehen ein Schnittpunkt zwischen Hyperbeln gebildet. Vorteilhaft hierbei ist die höhere Genauigkeit der Schnittpunktbestimmung und somit der Lokalisierung, bei identischer Genauigkeit der jeweiligen Einzelmessungen. Nachteilig ist aber die nicht immer mögliche Synchronisation aller stationären Module (13).
3 Bisherige Anwendungsfälle
Nachfolgend werden drei Anwendungsfälle für Lokalisierungen durch die UWB-Technologie beispielhaft dargestellt. Eine ausführlichere Beschreibung der Anwendungsfälle bietet (14).
In einem Braunkohlentagebau wurde die Robustheit des Verfahrens in widrigen Umgebungsbedingungen nachgewiesen. Dazu wurde eine eindimensionale Lokalisierung entlang eines Kohleförderbands durchgeführt. Trotz starken Regens konnte eine fehlerfreie Datenübertragung und Lokalisierung über eine Strecke von 200 m realisiert werden (Bild 2). Dabei wurde eine Genauigkeit von ca. 5 cm erreicht.
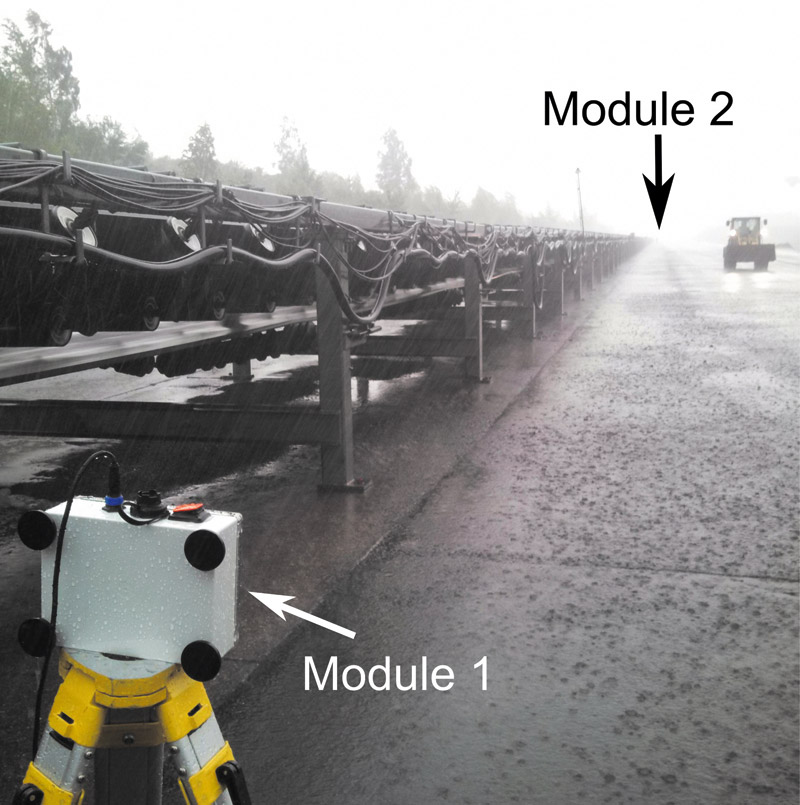
Fig. 2. Localisation measurement during heavy precipitation. // Bild 2. Lokalisierungstest bei starkem Regen. Photo/Foto: IMR
In einem vergleichbaren Anwendungsfall wurde die Position eines Bunkerentladewagens in einem Kohlebunker entlang der Streckenführung bestimmt. Im Gegensatz zum parallel verwendeten Lasermesssystem hat die Positionsbestimmung mittels UWB trotz starker Staubentwicklung problemlos funktioniert. Die Multipfadeffekte, die aufgrund des kleinen Bunkeröffnungsquerschnitts und der verwinkelten Bauweise entlang der Messstrecke vorhanden waren, haben die Lokalisierung ebenfalls nicht behindert.
Als Teilschritt hin zu einer Automatisierung eines Reclaimers wurde dessen Bewegung durch ein UWB-System verfolgt. Das System bestand aus zwei Basismodulen, die in einem Abstand von 400 m zueinander aufgestellt wurden. Das mobile Modul auf dem Reclaimer hat kontinuierlich die Abstände zu den Basisstationen bestimmt. Aufgrund der eindimensionalen Bewegung des Bunkerentladegeräts entlang des Strossenbands kann das zweite Modul unter der Voraussetzung, dass die initiale Position bekannt ist, als redundant angesehen werden.
4 Sensorfusion
Trotz der vielen Vorteile, die ein UWB Lokalisierungssystem aufweist, gibt es auch einige Nachteile. Dazu gehören z. B. die Notwendigkeit mehrerer ortsfester UWB-Module, um die Multilateration überhaupt durchführen zu können. Beim Einsatz unter Tage werden deutlich mehr Module benötigt als im Tagebau. Das liegt daran, dass für die Multilateration stets eine Sichtlinie zu mindestens drei ortsfesten UWB-Modulen vorhanden sein muss. Des Weiteren hängt die Genauigkeit des Gesamtsystems auch von der Position der ortsfesten Module ab. Trotz einer sehr präzisen eindimensionalen Entfernungsmessung kann die Gesamtpräzision des Systems sinken, wenn die Geometrie der Aufstellung der ortsfesten UWB-Module schlecht gewählt wurde.
Um das UWB-Lokalisierungssystem für den untertägigen Einsatz vorzubereiten, müssen diese Herausforderungen gelöst werden. Die Präzision eines umfassenden UWB Lokalisierungssystems muss trotz ungünstiger Ortsgeometrie der Anker den Anforderungen des Bergbaus entsprechen. Weiterhin sollte versucht werden, die Anzahl der benötigten Anker zu reduzieren, denn die Investitionskosten erhöhen sich natürlich mit einer steigenden Anzahl von Ankern.
Eine Möglichkeit diesem Problem zu begegnen, ist die sogenannte Sensorfusion. Dabei werden zwei oder mehr Sensoren kombiniert, um aus ihren individuellen Informationen eine verbesserte Ortsposition zu erhalten. Dies geschieht in Form eines Fusionsfilteralgorithmus. Dieser wertet die Sensorinformationen statistisch aus und vereinigt sie. Dadurch können die Nachteile des einen Sensors durch die Vorteile des anderen Sensors kompensiert werden (15).
Neben den UWB-gestützten Lokalisierungssystemen mit Sensorfusion gibt es noch weitere Ansätze für untertägige Lokalisierungssysteme. Exemplarisch zu nennen ist an dieser Stelle insbesondere das UPNS 4D+ Projekt. Sein Inhalt ist die Entwicklung eines untertägigen Lagerstättenpositionierungs-, Navigations- und Mappingsystems auf der Grundlage einer Sensorfusion. Hierbei wird ein System entwickelt, das sich einer Kombination aus Inertialnavigation und Laserscanner bedient.
Am IMR hat man sich dazu entschieden, ein System zu entwickeln, das die Informationen des UWB-Lokalisierungs-systems mit den Informationen aus einer inertialen Navigationseinheit (INS) vereinigt. Die Entwicklung eines solchen Systems wird in den nachfolgend beschriebenen drei Forschungsprojekten vorangetrieben.
4.1 Real-Time Mining Projekt
Die Idee zur Entwicklung eines Demonstrators für ein untertägiges Lokalisierungssystem für mobile Bergbaumaschinen auf Basis einer Sensorfusion wurde erstmals im Real-Time Mining Forschungsprojekt vorgestellt. Dieses Projekt wird von der EU im Rahmen des Horizon 2020-Programms mit dem Förderkenneichen 641989 unterstützt. Zusätzlich zu der gerade genannten Fusion aus UWB-System und INS wird das INS seinerseits durch die Informationen eines Laserscanners gestützt. Bereits hier erfolgt eine Fusion von Geschwindigkeitsinformationen und Pose beider Systeme.
Zur Auslegung des Systems und der Planung des Fusionsalgorithmus wurden zunächst zwei Anwendungsfälle definiert. Anwendungsfall 1 ist die präzise Lokalisierung von Bergbaumaschinen, wie beispielsweise Bohrfahrzeugen, am Stoß. Anwendungsfall 2 beschreibt die Lokalisierung sich dynamisch bewegender Bergbaumaschinen, z. B. Shuttle Cars, die eine hohe Updaterate der Positionsinformationen verlangen. In beiden Anwendungsfällen wird das UWB-System als absolutes Lokalisierungssystem mit Bezug zu bekannten Positionskoordinaten genutzt. Zusätzlich dazu werden die Informationen aus INS und Laserscanner – vorwiegend in Anwendungsfall 2 – zum Erreichen der hohen Updateraten verwendet. Bei der Auslegung der Systeme wurde eine zu erreichende Positionsgenauigkeit von 50 cm in einem 90 %-Konfidenzintervall definiert.
Erste Versuche im Real-Time Mining Projekt wurden im Bergwerk „Reiche Zeche“ der TU Bergakademie Freiberg Ende 2015 durchgeführt (Bild 3). Dabei wurde insbesondere das UWB-System für beide Anwendungsfälle untersucht. Für den dynamischen Lokalisierungsfall im zweidimensionalen Raum konnte dabei nur für das UWB-System allein eine Positionsgenauigkeit von 40 cm erreicht werden. Für einen stationären eindimensionalen Anwendungsfall über eine Messstrecke von 150 m, durch eine Streckenauffahrung gemessen, wurde eine Genauigkeit von 35 cm erreicht.
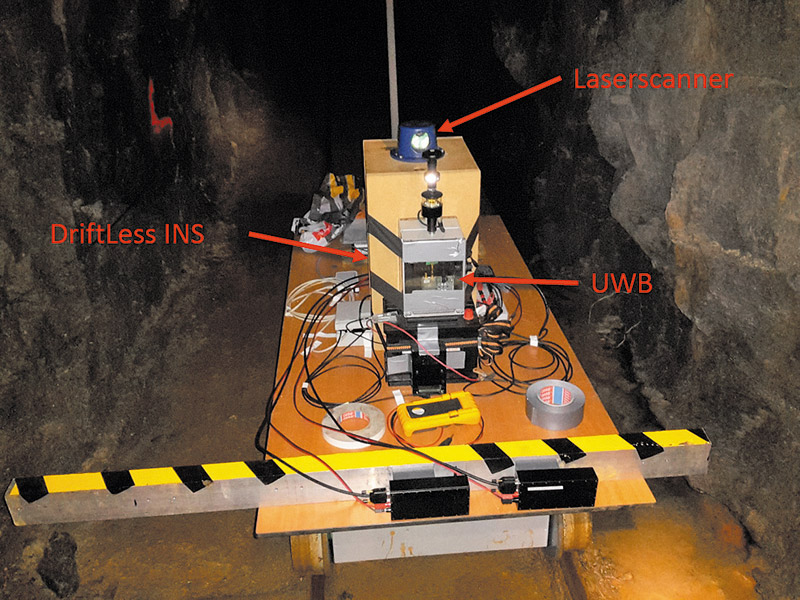
Fig. 3. Mine cart with sensors installed during the Real-Time Mining measurement campaign at the “Reiche Zeche” mine. // Bild 3. Hunt mit installierten Sensoren während der Real-Time Mining Testmessung im Bergwerk „Reiche Zeche“. Photo/Foto: IMR
Momentan werden noch Filteralgorithmen zur Verbesserung der Positionsgenauigkeit des UWB-Systems erstellt. Es ist zu erwarten, dass sich die Genauigkeit um einige Zentimeter verbessert. Im Anschluss daran wird ab April 2017 ein Fusionsalgorithmus implementiert. Damit können dann die Informationen des INS und des Laserscanners eingebunden werden. Insbesondere für den dynamischen Lokalisierungsfall ist zu erwarten, dass sich die erreichbare Genauigkeit weiter verbessert.
4.2 SIMS
Die Weiterentwicklung des Demonstratorsystems aus dem Real-Time Mining Projekt erfolgt ab dem Jahr 2017 im ebenfalls von der EU finanzierten Projekt Sustainable Intelligent Mining Systems (SIMS). Ziel ist es, den Anwendungsfall der Lokalisierung mit mehr als zehn UWB-Ankern durchzuführen. Auch hier wird eine Sensorfusion vorgenommen. Anstelle einer genauen und driftarmen INS, die aber gleichzeitig mit hohen Investitionskosten verbunden ist, soll der Einsatz von Low-Cost INS, wie sie in Smartphones verbaut sind, untersucht werden.
Parallel zur Lokalisierung sollen die UWB-Anker als Notfall-Mesh-Netzwerk zu Kommunikationszwecken zum Einsatz kommen. Dies kann einen Mehrwert im Fall eines großflächigen Einsatzes der UWB-Funktechnik in einem Bergwerk generieren. Neben der Lokalisierungsaufgabe besteht dann die Möglichkeit, ein unabhängiges, separates Kommunikationsnetzwerk zur Übermittlung von Informationen aufzubauen. Dies kann insbesondere bei Bergwerksunglücken von Vorteil sein, da im Batteriebetrieb keine Kommunikationskabel benötigt werden, die zerstört werden könnten. Weiterhin können die einzelnen Zellen im Mesh-Netzwerk potentielle Ausfälle einzelner UWB-Anker kompensieren. Die großflächige Erprobung beider Anwendungsfälle erfolgt in den kommenden drei Jahren in einem schwedischen Bergwerk.
4.3 EMD-Projekt
Die Weiterentwicklung hin zu einer konkreten Lösungsstrategie für den Bergbau stellt das im Rahmen des ZIM-Programms geförderte EMD-Projekt dar. Gemeinsam mit der Firma GTA ist das Ziel dieses Projekts die Entwicklung eines Betonspritzgeräts zur automatisierten und geführten Herstellung einer Spritzbetondecke. Dabei soll der Betonspritzprozess überwacht und gleichzeitig kontrolliert werden. Außerdem soll die Dokumentation des Betonspritzprozesses automatisiert nach Abschluss der Arbeiten erfolgen.
Hierzu werden Sensoren zur Erfassung des Tunnelprofils an der Spitze des Tragarms angebracht. Diese müssen lokalisiert und bei der Prozesskontrolle positioniert werden. Auch bei diesem Anwendungsfall soll ein Lokalisierungssystem auf Basis von UWB verwendet werden. Zur Verbesserung der Genauigkeit im Hinblick auf dynamische Bewegungsabläufe kommt außerdem die Sensorfusion mit einem INS zum Einsatz.
Die geforderte Genauigkeit für die Lokalisierung liegt im Zentimeterbereich. Neben geeigneten Algorithmen zur Verbesserung der Positionsinformation muss die geometrische Anordnung der UWB-Anker sorgfältig ausgewählt werden. Wie bereits beschrieben, kann dies einen maßgeblichen Einfluss auf die Präzision haben. Die technische Detailplanung für dieses Projekt ist kurz vor Fertigstellung dieses Beitrags abgeschlossen worden. Erste Ergebnisse werden Ende 2017 erwartet.
5 Zusammenfassung
Der vorliegende Beitrag stellt ein Lokalisierungssystem für unter Tage auf Basis der Ultra-Breitband Funktechnologie vor, wie es für die Automatisierung von Bergbaumaschinen im Rahmen von Bergbau 4.0 benötigt wird. Es werden sowohl die physikalischen als auch die technischen Grundlagen kurz beschrieben. Zusätzlich wird ein Überblick über Anwendungsfälle in bergwerksrelevanter Umgebung gegeben und einige ihrer Ergebnisse werden vorgestellt.
Im Anschluss wird ein Optimierungsansatz mittels Sensorfusion für das Lokalisierungssystem präsentiert. Neben ersten Ergebnissen aus dem Real Time-Mining Projekt werden abschließend zwei weitere Forschungsprojekte zur Entwicklung von Lokalisierungssystemen unter Tage am IMR mit ihren jeweiligen Schwerpunkten skizziert. Die Ergebnisse dieser Forschungsprojekte werden zukünftig ebenfalls vorgestellt werden.
References / Quellenverzeichnis
References / Quellenverzeichnis
(1) Gu, Y.; Lo, A.; Niemegeers, I.: A survey of indoor positioning systems for wireless personal networks. IEEE Commun. Surv. 11, 2009,
pp 13 – 32.
(2) Research and Markets: Indoor Location Market by Positioning Systems, Maps and Navigation, Location based analytics, Location based services, Monitoring and emergency services – Worldwide Market Forecasts and Analysis (2014 – 2019). 2014. Accessed October 2016. http://www.researchandmarkets.com/research/cmx9n8/indoor_-location
(3) Huang, H.; Gartner, G.: A Survey of Mobile Indoor Navigation Systems. In: Chapter 20 Cartography in Central and Eastern Europe. Springer Verlag, Heidelberg/Germany, 2009, pp. 305 – 319.
(4) Win, M. Z.; Dardari, D.; Molisch, A. F.; Wiesbeck, W.; Zhang, J.: History and Applications of UWB. Proc. IEEE, vol. 97, no. 2, 2009, pp. 198 – 204.
5) Mahfouz, M. R.; Zhang, C.; Merkl, B. C.; Kuhn, M. J.; Fathy, A. E.: Investigation of High-Accuracy Indoor 3-D Positioning Using UWB Technology. IEEE Trans. Microwave Theory Techn, vol. 56, no. 6, 2008, pp. 1316 – 1330.
(6) Federal Communications Commission: First Report and Order: Revision of Part 15 of the Commission’s Rules Regarding Ultra-Wideband Transmission Systems. Washington, D.C., 2002.
(7) Bundesnetzagentur: UWB, das Kurzstrecken-Kommunikations- und Sensor-Funksystem, 2015.
(8) Kuhn, M.; Mahfouz, M.; Turnmire, J.; Wang, Y.; Fathy, A.: A multi-tag access scheme for indoor UWB localization systems used in medical environments. In: Proceedings of the 2011 IEEE Topical Conference on Biomedical Wireless Technologies, Networks and Sensing Systems (BioWireleSS), Phoenix/USA, 16th to 19th January 2011, pp. 75 – 78.
(9) Data Sheet PulsOn 410. Time Domain, Huntsville/USA, 2013. 320-0289E.
(10) Hammer, F.; Yudanto, R.; Neumann, K.; Pichler, M.; Cockx, J.; Niestroj, C.; Petré, F.: Performance Evaluation of 3D-Position Estimation Systems. IEEE Sensors Journal vol. 16, Issue: 16, Aug.15, 2016, pp. 6416 – 6424.
(11) Chehri, A.; Fortier, P.; Tardif, P. M.: Geolocation for UWB Networks in underground mines. In: Wireless and Microwave Technology Conference. WAMICON ‚06. IEEE Annual, 2006, pp. 1 – 4.
(12) Emami, S.: UWB communication systems: Conventional and 60 GHz : principles, design and standards. New York, NY: Springer, 2013.
(13) Daixian, Z.; Kechu, Y.: EKF Localization Based on TDOA/RSS in Underground Mines Using UWB Ranging. Signal Processing, Communications and Computing (ICSPCC), IEEE International Conference, 2011.
(14) Neumann, K.; Eichentopf, B.; Niestroj, C.: Ultra-Wideband Radio Technology for the Heavy Industry. World of Mining, Surface & Underground 67 (2015) No. 5: pp. 307 – 313-
(15) Elmenreich, W.: Sensor Fusion in Time-Triggered Systems. Dissertation. Wien, 2002, pp. 7 – 9.
